J043——————————————————————————–
 Affordable autonomous quadcopters
Affordable autonomous quadcopters
Many research have demonstrated the ability of quadcopters to perform fast, complex and precise maneuvers indoors, thanks to sophisticated control mechanisms. However, these demonstrations usually rely on the use of heavy, expensive infrared camera systems (VICON), preventing anyone of reproducing these demonstrations “at home”.
The aim of this project is to migrate progressively the existing setup based on the Crazyflie quadcopters and the VICON system of the lab. External absolute position tracking is always necessary and will be performed by low-cost webcams and colour trackers on the quadcopters. Apart from that, only the on-board sensors will be used to stabilize the quadcopter. This project mainly consists in the implementation of advanced estimators and image processing algorithms.
Skills required:
- Some coding experience (Python and Matlab will be used)
- Basic control.
- Experience with estimation and Kalman filtering is a plus.
- Experience with image processing is a plus.
Professor: Colin Jones
Type of project: Semester
Contact: Tomasz Goreki and Altug Bitlislioglu
Student: Oussama Zouaghia
B057——————————————————————————–
 Modelling and control of soap making process
Modelling and control of soap making process
Soap making process is relatively simple, but still representative of many challenges that arise during control of batch reactors. The time it takes to complete a batch and the quality of the soap is highly sensitive to the temperature and concentration profiles during operation.
The aim of this project is to develop a reliable model for a small scale saponification reactor, to be used in various model based control techniques that are developed in the Laboratoire d’Automatique. The model parameters will be identified and validated via experiments. The resulting model will be used to test control methods through simulations.
Requirements: Background in modelling of chemical reactors and control theory.
Professor: Dominique Bonvin
Type of project: Semester
Contact: Altug Bitlislioglu, Tafarel De Avila Ferreira
Student: Francois Abbet
K039——————————————————————————–
 Control of an air-Hockey robot
Control of an air-Hockey robot
Over the previous semesters we have designed and built a basic framework for a robot that is able to play air-hockey. A good control scheme has been developed and implemented, but there is still need for improvement.
The aim of this project will be to refine and optimize the existing controller in order to provide good path-following. Additional tasks involve the implementation of a static friction compensator and backlash correction. The controller will be implemented in Labview.
The student should be familiar with advanced control techniques, Matlab and Labview.
MER: Alireza Karimi
Type of project: Semester
Contact: Christoph Kammer
Student: Marc Liechti
K043——————————————————————————–
Vision and image processing for airhockey robot
Over the previous semesters we have designed and built a basic framework for a robot that is able to play air-hockey. We use a camera positioned over the playing field to locate the puck and aid the positioning of the robot arm.
The aim of this project will be to improve the current algorithm used to detect and predict the puck position. The measurement should be robust towards lighting conditions and disturbances. The camera should autonomously adjust to varying conditions without human intervention. The image processing is performed on the camera itself, and its source code may have to be modified as well.
The student should be familiar with basic image processing, and should have solid skills in C/C++.
MER: Alireza Karimi
Type of project: Semester
Contact: Christoph Kammer
Student: Ilaria Lauzana
MC001——————————————————————————–
 Control of a triple arm inverted pendulum
Control of a triple arm inverted pendulum
The LA recently upgraded its single arm inverted pendulum into a triple arm inverted pendulum. The mechanical part as well as the measurements part are now completed. The fun part can begging. The challenge of this project is to control the triple inverted pendulum. Control scenarios will first be simulated using mathematica and/or matlab The implemented and validated using LabVIEW.
This project requires the following courses: Control Systems or Automatic and Commande Multivariable or equivalent. Nonlinear control will be a plus.
Teacher: Philippe Mullhaupt and Christoph Salzmann
Type of project: Semester
Contact: Ehsan Sarshari
Student: Antoine Burnand
J022——————————————————————————-
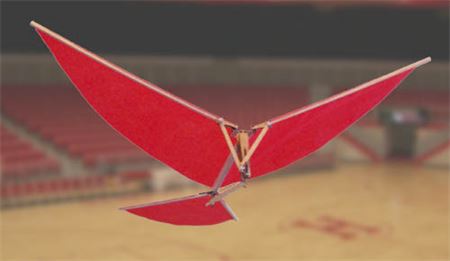 Modeling and control of a flapping wing aircraft (Ornithopter)
Modeling and control of a flapping wing aircraft (Ornithopter)
Biological flyers, such as ornithopters, use different means of propulsion than human engineered air vehicles. In specific they use flapping wings instead of spinning blades to move and steer. This allows them to be lightweight and highly manoeuvrable. They also present an interesting case for studying nonlinear system dynamics and control in periodic settings.
Nonetheless, the aerodynamic forces generated by flapping are not easily quantifiable. The project aims in modelling the unknown ornithopter dynamical system starting from first principles and moving towards model identification and learning techniques through experimental testing. The second part of the project will focus in synthesising a controller that employs the developed model and exploits the periodic properties of the system.
Professor: Colin Jones
Type of project: Semester
Contact: Sanket Diwale and Ioannis Lymperopoulos
Students: Edouard Sergent and Guillaume Demeeus
B059——————————————————————————–
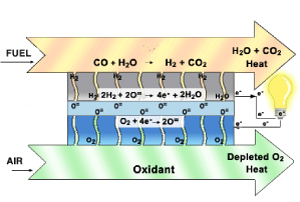 Modeling and optimization of a the life-time of a fuel cell stack
Modeling and optimization of a the life-time of a fuel cell stack
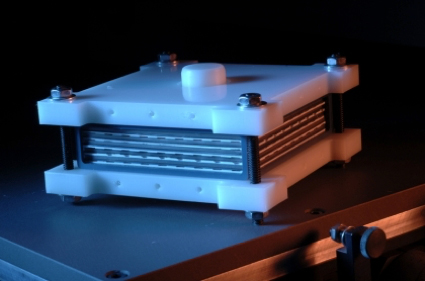
Solid oxide fuel cells (SOFCs) are devices that convert electrochemically hydrogen and oxygen into electrical energy. These devices present excellent characteristics such as high efficiency, low emission and fuel flexibility. However, lifetime is still a major issue for the widespread use of SOFCs.
In this project, we seek a motivated student to work on the modeling and optimization of lifetime issues of SOFC systems. The project aims at extending existing models of SOFC stacks to include degradation effects. Based on such an extended model, the problem of optimizing the stack efficiency should be formulated and tackled numerically. More precisely, the project involves the following tasks:
- Analysis of an existing model of an SOFC stack.
- Literature research on modeling of degradation effects.
- Extension of the existing SOFC model to take lifetime issues into account.
- Numerical optimization of the twofold problem efficiency/lifetime of the SOFC stack.
Suitable candidates should have a good background in Matlab programming, thermodynamics, control and optimization. Pre-knowledge about fuels cells would be a plus.
Professor: Dominique Bonvin, Jan van Herle
Type of project: Semester
Contact: Tafarel de Avila Ferreira, Alejandro Marchetti, Timm Faulwasser
Student: Henri Bittel
B056——————————————————————————–
 Real-time optimization of a fuel cell system
Real-time optimization of a fuel cell system
Solid oxide fuel cells (SOFCs) are electrochemical systems converting hydrogen and oxygen to water and thereby converting chemical energy into electrical energy. Due to their high efficiency SOFCs could potentially replace large fossil-fuel driven power plants in the future. For safety and economical reasons, SOFCs should be operated in a safe operating region and close to their maximal efficiency.
In this project, we seek a motivated student to work on the real-time optimization (RTO) of SOFC stacks and systems. The project aims at the formulation and solution of optimization problems using Matlab. More precisely, the project involves the following tasks:
- Analysis of an existing RTO implementation for a SOFC system.
- Design of different optimization problems for a complete SOFC system, following power-driven and efficiency-driven policies.
- Literature search on lifetime issues and on the degradation of SOFC stacks.
- Formulation of an RTO scheme taking degradation into account.
- Simulation of the proposed formulations for different operating modes of the SOFC.
Suitable candidates should have a good background in Matlab programming, control and optimization. Pre-knowledge of fuels cells would be a plus.
Professor: Dominique Bonvin, Jan van Herle
Type of project: Semester
Contact: Tafarel de Avila Ferreira, Alejandro Marchetti
Student: Aris Papasavvas
J045——————————————————————————–
 Outdoor model car control
Outdoor model car control
The goal of the project is to integrate available software and hardware to control a scale car on an outdoor environment and implement path-following algorithms. The project may follow the steps below:
- Complete software and hardware setup development.
- Code path-following algorithm.
- Document the performance of the setup.
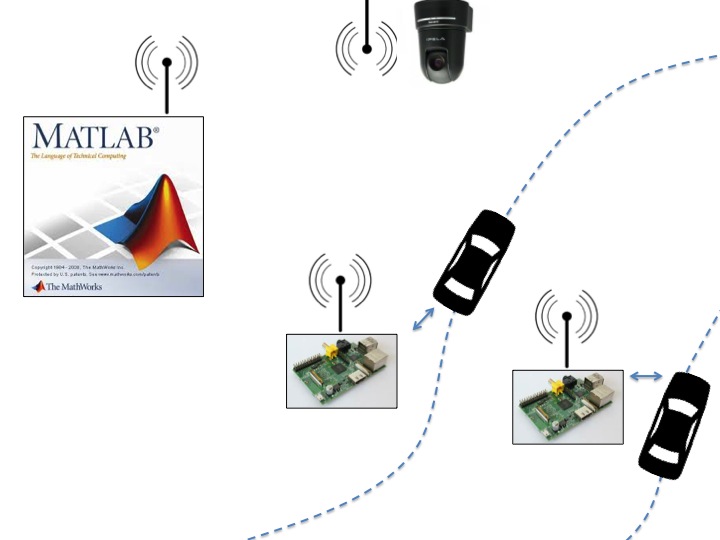
The structure consists of three main components interconnected via WiFi:
- A Matlab server, for coordination.
- Micro computers (e.g. Raspberry pi) mounted on board of the vehicles and connected to the actuators and sensors of the vehicles.
- RF system in charge of detecting the position of the vehicles or GPS.
Requirements: the student should possess (or be willing to earn) great practical skills (hardware/programming) and enthusiasm!
Professor: Colin Jones
Type of project: Semester
Contact: Francisco Rego
Student: Denis Bussier
J041——————————————————————————–

Path-following Model Predictive Control for riderless motorcycles
Controlling a riderless motorcycle is a challenging task as the dynamics are highly nonlinear and non-minimum phase. Moreover, suspension or chain pull effect make the dynamics more complicated to model accurately.
In this project, you will investigate the proper modelling of a riderless motorcycle for control, based on simulations and literature. You will then identify a nonlinear model for a real Thunder Tiger motorcycle. If there is time, you will finally design a path-following Model Predictive Controller for controlling the motorcycle along a path.
Skills: Matlab, Control systems and enthusiasm !
Professor: Colin Jones
Type of project: Master
Contact: Jean-Hubert Hours and Luca Fabietti and Shukla Harsh Ambarishkumar
Student: Julien Leimer
J044——————————————————————————–
 Formation control of model cars
Formation control of model cars
This project focuses on the realization of a software and hardware platform and applying formation control strategies on model cars. The structure consists of three main components interconnected via WiFi:
- A Matlab server, for coordination.
- Micro computers (e.g. Raspberry pi) mounted on board of the vehicles and connected to the actuators and sensors of the vehicles.
- Camera system in charge of detecting the position of the vehicles.
Requirements: the student should possess (or be willing to earn) great practical skills (hardware/programming) and enthusiasm!
Professor: Colin Jones
Type of project: Semester
Contact: Francisco Rego
Student: Amaury Soviche
J032——————————————————————————–
 Formation control of underwater vehicles
Formation control of underwater vehicles
With the advent of powerful embedded processors, sensors, and acoustic communication systems, there has been increasing interest in the use of autonomous underwater vehicles (AUV’s) for ocean exploration.
The application of distributed control algorithms on autonomous underwater vehicles will allow missions that require multi-sensor interaction in close vicinity of a terrain being surveyed, which is generally a difficult task for a single vehicle.
As an example, we consider a mission where one or more surface vehicles (the anchor vehicles) are equipped with GPS, so as to follow desired paths. It is up to the remaining follower vehicles in the fleet to reach and keep a desired formation with the anchor vehicles. The follower vehicles are required to maneuver into formation by relying on measurements of their distances to the other vehicles and exchanging complementary data with them.
Two projects are considered under this topic:
- The objective of the first project will be the estimation of the relative position of the follower vehicles using moving horizon estimation, a state estimation method, and simulate its performance. Some attention will be devoted to the modelling of the physical system for the simulation setup.
- One of the main difficulties in formation control is that there are limitations on the communication links between vehicles. Acoustic communications have a low bandwidth, is prone to packet losses, and simultaneous communications are impossible. The objective of the second work is, therefore, to devise a distributed extended Kalman filter that takes into account the fact that a limited number of bits per second can be exchanged between vehicles. Some attention will be devoted to the modelling of the communication performances for the simulation setup.
Requirements: Good background in Nonlinear Control, MATLAB.
Professor: Colin Jones
Type of project: Master
Contact: Francisco Rego
Student: Mathieu Bresciani
J033——————————————————————————-
 Optimal control of a hydrofoil boat
Optimal control of a hydrofoil boat
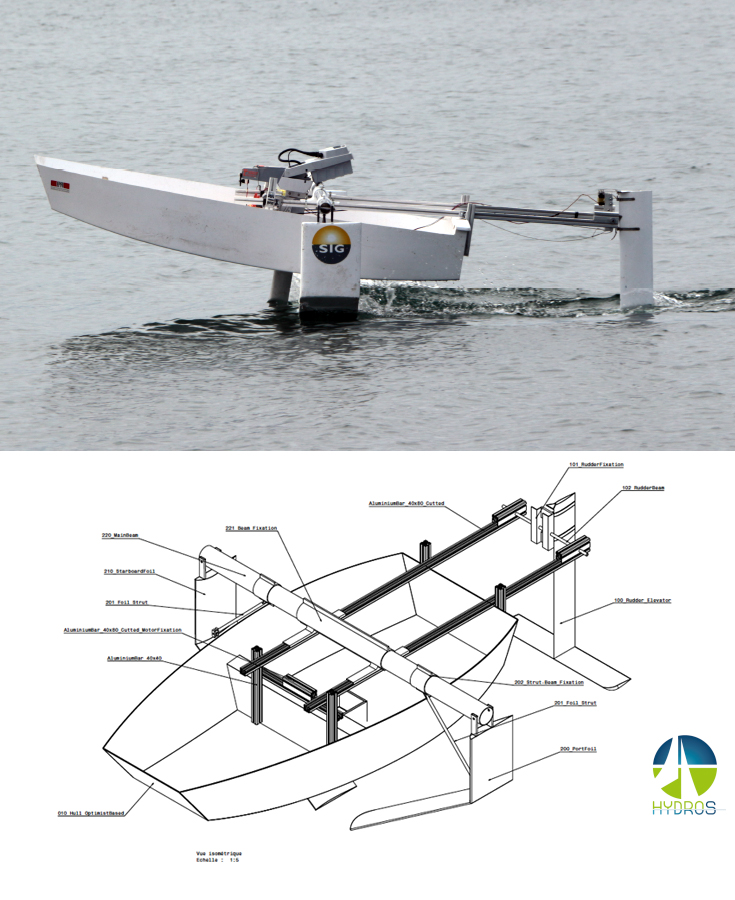
HYDROS, the Swiss scientific research center specialized in sailing, is holding an engineering competition to take place in lake Léman, summer of 2014 (see link). The goal is the construction of an energy efficient hydrofoil boat. EPFL has forged a group of teams that specialize on optimizing each of the specific components of the system. LA is responsible for the dynamical modeling of the boat in order to plan effective trajectories and track them in the face of uncertainties.
The first part of the project focused in modeling the boat dynamics and discovering the optimal control policies in simulation. The second part, due to start in the next spring semester, is going to explore the interaction of the boat with the environment in a realistic setting. Model-mismatch and external disturbances might deem the control policies suboptimal or even infeasible. The project will focus in robustifying the system against uncertainties.
Professor : Colin Jones
Type of project: Semester
Contact: Ioannis Lymperopoulos
Students: Valentin Mottier and Enrico Turrini
J031—————————————————————————
Exploration of highly parallelizable optimisation algorithms for control
The need for real-time high-speed model predictive control (MPC) is evident during the last years, dictated from advanced control applications and industrial processes. Even more recently, the trend for distributed control policies has raised attention, motivated either from problems that maintain a distributed structural representation or from the need for decentralized computations.
Decomposition algorithms seem to be the solution to many of the above problems. There is a vast and rapidly growing literature in these methods that have recently made their way into the control community.
The aim of the project is to explore a few very recent algorithms that seem to achieve a high level of parallelisation given a specific problem. The student is expected to understand the theoretical content of the methods, to apply them to MPC problems and to perform comparisons. Ideally, an efficient C-code implementation would be the project’s output.
Remark: The figure is borrowed from Dattorro: Convex Optimization and Euclidean Distance Geometry
Professor: Colin Jones
Type of project: Semester
Contact: Georgios Stathopoulos
Student: Martin D’Hoff Schmidt
MP001——————————————————————————–
 Biomechanical Model of the Shoulder to Address the Joint Translation
Biomechanical Model of the Shoulder to Address the Joint Translation
Given the complexity of musculoskeletal structure of the human shoulder, the associated treatments do not always result in optimal solutions. Knowledge about muscle forces and joint translations can help improve the associated treatments. However, direct measurement of these quantities without invasive surgery is not yet possible. Biomechanical models of the shoulder allow non-invasive estimation of the muscle forces. Information about these translations is in high clinical demand to address the joint dislocation and implant design. This project aims at exploiting feedback control to address the joint translations in the main shoulder joint.
Professor: Dominique Pioletti and Philippe Mullhaupt
Type of project: Semester
Contact: Ehsan Sarshari
Student: Maxim Valdemarin
B058——————————————————————————
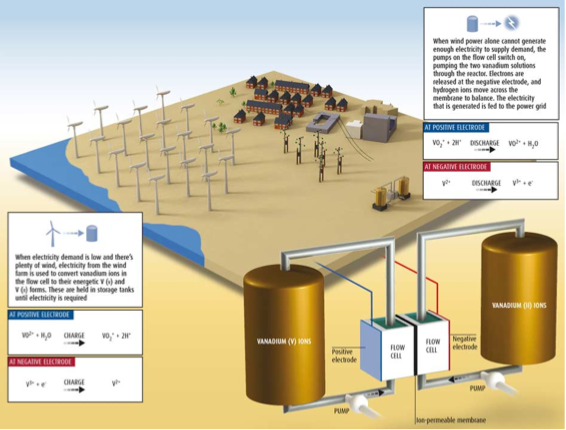
Optimization of a Redox flow battery for hydrogen generation
In the development of efficient smart grid technologies, fast and reliable storage of electrical excess energy provided by the grid is key to ensure efficiency.
This project is in collaboration with the Laboratory of Physical and Analytical Electrochemistry of Prof. Hubert Girault and the electricity distributor Sinergy in Martigny. It is proposed to investigate the potential of dual-circuit redox flow batteries as a storage mean for electrical excess energy. The project includes:
- Development of a basic dynamic model of a redox-flow battery;
- Formulation of a dynamic optimization problem to minimize the losses for varying load profiles;
- Numerical solution to the optimization problem;
- Verification on a real system available at Martigny
Requirements : Suitable candidates should have a good background in control and optimization. Basic knowledge of thermodynamic and electrochemistry would be a plus. This project is intended to start as soon as possible.
Professor: Dominique Bonvin
Type of project: Master
Contacts: Timm Faulwasser (Optimization), Julien Billeter (Modeling)
Student: Daniel Wrang