L043—————————————————————————————-
 Feedback linearization of the Delta robot
Feedback linearization of the Delta robot
The purpose of this project is to study and evaluate various feedback linearization techniques applied to the Delta robot. In particular, classical computed torque methods will be compared with jet-scheduling. The following points should be taken into account with care:
- Modeling of nonlinarities, actuator dynamics and arm stiffness. Normalized dynamics.
- Impact of actuator dynamics and arm stiffness on the geometrical model used for feedback linearization. Especially the consequence on the lengths of the chains of integrators should be studied.
- Trajectory and motion planning. Comparison between theoretical solutions based on differential flatness and classical ones used in industry. Impact of the order of interpolation and trajectory shapes on the maximum value of the applied torques.
- Dynamical reduction of the arm-stiffness dynamics using singular perturbation techniques.
The study will be carried out using simulations in Matlab and Mathematica.
Professor: Roland Longchamp
Type of project: Master
Student: Patrick Clerc
Contact: Basile Graf and Philippe Mullhaupt
J005—————————————————————————————

High-resolution vision system for tracking of race cars
The Fast Toy Lab (FTL) is developing a high-speed, micro-scale autonomous race course for 1:43 scale RC cars. We will produce extremely fast 10cm cars and controllers capable of racing (and winning) against all comers! You can see examples of human racing here and past projects here.
In this project you will develop a high-resolution vision system to track Kyosho dNano race cars at 200 Hz. Estimating their location and orientation is a key step for real-time optimal control. The system should be able to recognize cars out of 2D images and track them. The main part of the project is to implement a LabVIEW platform for tracking the cars from the cameras in real-time.
Tasks:
- Develop the acquisition and calibration software for cameras using LabVIEW and OpenCV.
- Apply vision methods for tracking cars on 2D images (pattern recognition).
- Modeling and design of a Model Predictive Controller for path-planning and optimal control.
Skills:
- LabVIEW and C/C++
- Computer Vision
Professor: Colin Jones
Type of project: Master
Student: Philipp Horler
Contact: Jean-Hubert Hours
L042———————————————————————————
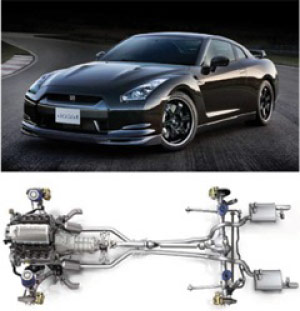
Modeling the NISSAN GTR launch control system
The new NISSAN GTR is a sports car which on paper has lower performance than most of its competitors such as the Jaguar XKR S, Porsche 911, etc… However, because of the electronic control systems it uses to manage the different parts of the car, (motor, gear box, suspension, breaks, etc…) it is able to beat it’s competitor on almost every level. It’s launch control system allows it to go from 0 to 100 km/h in 3 seconds (see here). It’s suspension management system allows it to go through corners at higher speeds. Thus, the NISSAN GTR really shows the advantages of using control to optimize the performance of a car.
The aim of this project will be to model a car using the MATLAB/SIMULINK environment and then try do design to begin with, a launch control system that produces similar performance as the NISSAN GTR. The project will also try to use the Simmechanics library of SIMULINK to implement the model.
Professor : Roland Longchamp
Type of project: Semester
Student : Ting Yao
Contact: David Ingram and Philippe Mullhaupt
K023—————————————————————————————-
 Direct data-driven techniques for laser beam stabilization
Direct data-driven techniques for laser beam stabilization
Laser beam stabilization is a technology frequently used in aerospace, in manufacturing equipment such as semiconductor inspection or materials processing, and in biomedical systems. All these applications require precise mechanical alignment free of annoying effects like vibrations introduced by nearby mechanical components (e.g., fans). To address this issue, stabilization systems are required to simultaneously manage both large-angle/low- frequency, and small-angle/high-frequency corrections. Applying this technology will also result in improved performances (and life cycles) of system components, like bearings, motors and sensors.
The goal of this project is to test innovative data-driven control design techniques, i.e. methods where the controller is directly derived from experimental data, on this critical application. This work is motivated by the fact that unacceptable performance is often due to modeling errors. The control algorithm will be applied on a real experimental setup including a single-axis, fast-voice steering mirror and a high-resolution position sensing detector (PSD). More specifically, the aim of the control problem is to reduce the oscillations to less than 50 micrometers.
MER: Alireza Karimi
Type of project: Semester
Student: Maryam Razeghian Jahromi
Contact: Simone Formentin and Mahdieh Sadabadi
B043—————————————————————————
Iterative controller tuning of a torsional system
Traditionally, the PID controller has been the most standard type of controller used in industry and application. However, its capabilities are limited by the fact that it is parameterized via only three parameters, and so much recent work has focused on developing higher-order controllers to achieve greater performance in terms of tracking and robustness.
However, such controllers are more difficult to retune if they perform differently in practice than in simulation. The purpose of this work is to apply a modifier-adaptation optimization method to auto-tune these controllers in real time based on the observed performance during certain predefined time intervals, thereby finding a locally-optimal set of controller parameters based on feedback data. The interested student would apply the method to the lab’s experimental torsional system and compare its performance to traditional adaptive control approaches.
Professor: Dominique Bonvin and Alireza Karimi
Type of project: Semester
Student: Fraire Tirado Fernando
Contact: Gene Bunin and Zlatko Emedi
J007—————————————————————————

Trajectory optimization of palm-sized quad-copter
Professor: Colin Jones
Type of project: Semester
Student: Paul Koch
Contact: Andrea Alessandretti
L039———————————————————————————

Modeling & control of a self balancing unicycle
Many circuses propose an act where a person rides a unicycle across a wire usually holding a long pole. The pole is there to add stability to the system without which the act becomes virtually impossible due to high instability of the system (unicycle & rider). Adding a pole lowers the center of gravity of the system making it easier to stabilize.
The goal of this project is to develop a model of a unicycle without rider which can perform the circus act. Once a working model is developed, the next step is to design a control strategy for the system towards creating a robot capable of performing the act. Modeling such a system is challenging because of its complexity and numerous degrees of freedom. Control is also not a simple task because of the number of states and high instability.
Professor : Roland Longchamp
Type of project: Semester
Student: Jerome Waeber
Contact: David Ingram and Philippe Mullhaupt
B040——————————————————————————————-
Efficiency modeling of an urban waste incinerator
Tridel is a company located in Lausanne that processes urban waste of 144 cities and villages in the Canton de Vaud. Up to 160’000 t/year of waste is burnt in two furnaces, and the generated heat is used to produce overheated steam. Most of this steam is valorized as thermal energy for remote heating of private houses in Lausanne, while the rest drives a turbine to generate electricity.
The primary goal is to characterize how the efficiency of the electricity production varies with respect to the remote heating demand and the amount of steam produced by the boilers. While the remote heating demand is outside of Tridel’s control, the steam flow can be adjusted by burning more, or less, refuse. The characterization will be based on measurements taken by Tridel. Once obtained, it can be used to adjust the steam flow rate such as to maximize efficiency. The performance of such a strategy will be investigated in simulation and compared with the current operating strategy.
Professor: Dominique Bonvin;
Type of project: Master
Student: Marc Olivé Torralba
Contact: Gregory Francois and Sean Costello
L044—————————————————————————————-
 Industrial delta-robot control
Industrial delta-robot control
The goal of the project is to improve speed and precision of an industrial delta robot. Different motion control architectures and strategies will be evaluated and compared. The project will be carried out in collaboration with Asyril SA.
Following tasks will be included:
- System identification for two different robot sizes.
- Control requirements definition (sampling time, latency).
- Implementation on different hardwares.
- Development and validation of an advanced control strategy.
Professor: Roland Longchamp
Type of project: Master
Student: Sandro Montanari
Contact: Basile Graf and Philippe Mullhaupt
K024————————————————————————–
 Resilience of distributed averaging algorithms
Resilience of distributed averaging algorithms
The consensus problem is a well-known topic in the field of distributed intelligence. This problem implies a certain number of agents which have some communication skills. It enables them to exchange data and creating a network. The consensus problem has been well studied during these past years. However, researchers have been focusing on the convergence rates of the different algorithms. Only few papers make the assumption that some of the agents are malfunctioning or even try to prevent convergence of the algorithm. The resilience to malfunctioning agents in the network is a very important topic since malfunction is highly likely to happen in real application.
The proposed goal of this project is to investigate the resilience of some unexpected behavior, to determine some bounds for the error on the result and to propose some modifications of existing protocols to overcome the problem.
This project is carried out in Yale University under the supervision of Professor A. S. Morse.
MER: Alireza Karimi
Type of project: Master
Student: Yves Buntschu
J010—————————————————————————————

Dynamic path-planning for micro-scale race cars
This project will develop control strategies for automatic racing. The focus is on designing a controller that aims at minimizing lap time and takes into account competing cars on the track. The goal of the project is to formulate a mathematical framework for scale car racing and investigate the optimal controller. The project includes the following steps:
- Survey techniques for optimal path-following and obstacle avoidance.
- Compare optimal control techniques based on Model Predictive Control against standard, non-optimization based controller.
- Investigate possible strategies for dynamic obstacle avoidance.
- Develop simulation platform for controller comparison and testing of obstacle avoidance approach.
- Implement optimal controller on physical racetrack.
Professor: Colin Jones
Type of project: Master
Student: Joel Rey
Contact: Melanie Zeilinger and Ye Pu
J011—————————————————————————————
Dynamic path-planning for micro-scale race cars
This project will develop control strategies for automatic racing. The focus is on designing a controller that aims at minimizing lap time and takes into account competing cars on the track. The goal of the project is to formulate a mathematical framework for scale car racing and investigate the optimal controller. The project includes the following steps:
- Survey techniques for optimal path-following and obstacle avoidance.
- Compare optimal control techniques based on Model Predictive Control against standard, non-optimization based controller.
- Investigate possible strategies for dynamic obstacle avoidance.
- Develop simulation platform for controller comparison and testing of obstacle avoidance approach.
- Implement optimal controller on physical racetrack.
Professor: Colin Jones
Type of project: Master
Student: Joel Rey
Contact: Melanie Zeilinger and Ye Pu

Design of a new Mini-Z scale race car for drifting control
This project will develop control strategies for automatic racing. The focus is on designing a controller that aims at minimizing lap time and takes into account competing cars on the track. The goal of the project is to formulate a mathematical framework for scale car racing and investigate the optimal controller. The project includes the following steps:
- Survey techniques for optimal path-following and obstacle avoidance.
- Compare optimal control techniques based on Model Predictive Control against standard, non-optimization based controller.
- Investigate possible strategies for dynamic obstacle avoidance.
- Develop simulation platform for controller comparison and testing of obstacle avoidance approach.
- Implement optimal controller on physical racetrack.
Professor: Colin Jones
Type of project: Master
Student: Raphael Zaugg
Contact: Melanie Zeilinger and Ye Pu