B041——————————————————————————–

Modeling, optimization and control of a tethered kite for power generation
At high altitudes wind is considerably stronger, more stable and more consistent than wind close to the ground, making it an extremely promising, untapped source of energy. The problem is that the energy is several kilometers from the surface of the earth and constructing wind turbines 2km tall is infeasible. A host of innovative ideas have been proposed for accessing high-altitude wind, such as floating turbines, self-sustained spinning foils and giant balloons. Kites appear to be one of the most promising (and realistic) means of harnessing this energy.
The primary goal of this project is to develop a functioning dynamic model of a tethered kite. A kite is essentially a foil, and foils have been studied extensively as part of aerodynamics. A kite will generate far more force on the lines if it is constantly moving than if it remains in one spot. The second step in this project will be to use the tools of dynamic optimization to calculate the optimal periodic trajectories for power generation.
Professor: Dominique Bonvin
Type of project: Semester
Student: Alex Mermoud
Contact: Gregory Francois and Sean Costello
L039—————————————————————————————–

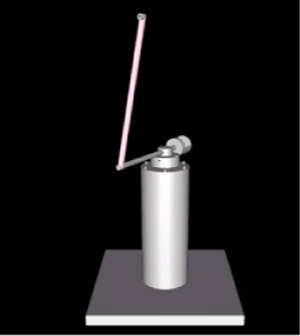
Modeling & control of a self balancing unicycle
Many circuses propose an act where a person rides a unicycle across a wire usually holding a long pole. The pole is there to add stability to the system without which the act becomes virtually impossible due to high instability of the system (unicycle & rider). Adding a pole lovers the center of gravity of the system making it easier to stabilize.
The goal of this project is to develop a model of a unicycle without rider which can perform the circus act. Once a working model is developed, the next step is to design a control strategy for the system towards creating a robot capable of performing the act. Modeling such a system is challenging because of its complexity and numerous degrees of freedom. Control is also not a simple task because of the number of states and high instability.
Professor : Roland Longchamp
Type of project: Semester
Student: Jufeng Lu
Contact: David Ingram and Philippe Mullhaupt
B042—————————————————————————————
Identification of boat performance
In a sailboat race, important gains can be made when the boat sails at its optimal angle. To achieve this, boat performance needs to be quantified. The theoretical performance is described in the boat polar, which is defined through the boat speed seen as a function of both wind angle and velocity. However, the real performance is more complex to describe and varies from day to day due to environmental influences such as wind shear, wind gradient, sail trim, waves and current that are difficult to measure. The goal of this project is to develop a self-adaptation method to identify the boat performance for a given day using data from the boat instruments. These data include boat velocity, acceleration, and wind at mast top. Various methods will be compared with an emphasis on filtering techniques combined with (i) classical least squares curve fitting (LSCF) and (ii) asymptotic equilibrium least squares curve fitting (AELSCF).
Professor: Dominique Bonvin
Type of project: Semester
Student: Patrice Salameh
Contact: Jean-Claude Monnin and Philippe Müllhaupt
L038—————————————————————————————-
Modeling & control of the inverted pendulum on a cart
The inverted pendulum is a well known widely used test bench for multivariable control implementations. However, before any such implementations can be carried out, a dynamic model is necessary. Modeling such a system is of interest because the system is relatively simple to understand but difficult to translate onto paper due to the presence of friction, the elasticity of the belt driving the cart, etc…
Once a working model is developed, controllers can then be developed using the model and implemented to test their real performance on such a system. The goal of this project is to develop an extensive dynamic model of the system and then develop a control strategy which is to be implemented and tested.
Professor : Roland Longchamp
Type of project: Semester
Student: Fabio Dellagnola
Contact: David Ingram and Philippe Mullhaupt
B037—————————————————————————————-
 Comparison of tuning schemes for Model-Predictive-Control
Comparison of tuning schemes for Model-Predictive-Control
In recent decades, model-predictive control (MPC) has gained widespread popularity, in both industry and academia, as an applicable and effective type of advanced control that regulates a process in a more eloquent, centralized manner – using a simple model to robustly control the system via repeated optimization. Despite this, a common drawback of many MPC formulations is the somewhat involved mathematics crucial to good performance, with the tuning of some parameters not overly obvious to the typical user.
The purpose of this work is to help lessen this expertise barrier by exploring an LA-developed tuning mechanism that is intuitively simple, applicable in a black-box manner, and safe because of its emphasis on the satisfaction of plant constraints. Because the approach is relatively new, the willing student would need to simulate and investigate a number of case studies on traditional examples, employing the stated methodology and comparing it to the more classical one. Finally, the student will be encouraged to select an application where MPC is still relatively new, and to compare the different approaches for that case.
Professor: Dominique Bonvin
Type of project: Semester
Student: Fernando Frairetirado
Contact: Gregory Francois and Gene Bunin
L033 —————————————————————————————-
Motion planning control for the snake-like robot Amphibot III
The goal of the project is to applied on the motion planning problem of a snake-like robot (here the Amphibot III), the classical tools of control theory. The first step of the project will consist in reducing the inverse dynamic model of Amphibot III. This numerical model is a recursive algorithm based on the Newton-Euler equations (cf. [1]). It computes the head accelerations and the joint torques as a function of the joint positions, velocities and accelerations. As far as the reduced model is concerned, it will be obtained by systematic tests. The idea is to design a map of the forward mean velocity of the robot head as function of the input parameters of the propulsion wave moving along the body (i.e. frequency, amplitude, phase lag). Then in a second step, in order to applied the control laws, the student will design a kinematic model of the snake-like robot. This model will be of n-trailers type. Finally, on the base on the kinematic model, the last step of this project will consist in applying control laws based on the flat output theory [2].
[1] W. Khalil, G. Gallot and F. Boyer, “Dynamic modeling and simulation of 3-D serial eel-like robot”, IEEE Trans. on Systems, Man, and Cybernetics – Part C: Applications and reviews, vol. 37, no 6, November 2007
[2] P. Rouchon, M. Fliess, J. Levine and P. Martin, “Flatness, motion planning and trailers systems”, Proceeding of the 32nd C.D.C, San Antonio, Texas, December 1993.
This project is carried out in collaboration with Mathieu Porez from Biologically Inspired Robotics Group.
Professor : Roland Longchamp
Type of project: Semester
Student: Amalric Ortlieb
Contact: Philippe Mullhaupt
B033—————————————————————————
Nonlinear controller for a circular pendulum with restricted input
The project aims at developing a controller using the SIM (Successive Invariant Manifold) algorithm for a circular pendulum. The nonlinear controller developed using SIM assumes the possibility of infinitely large input values, which is in fact the case for most initial conditions. However, in practice, the system has limited input power. The aim of this project is to develop a strategy that allows the controller to work with restricted inputs. The student will either make appropriate changes to the SIM algorithm or develop a suitable strategy so that the pendulum can be brought to the upright unstable position with limited input power.
Professor: Dominique Bonvin
Type of project: Semester
Student: Ting Yao
Contact: Willson Shibani and Philippe Müllhaupt
G042——————————————————————————–
Stochastic modeling of diabetics
Blood glucose concentrations show a very high variability for every individual, but also from one person to another. However a relatively accurate prediction of these concentrations is important for the treatment of persons with Type 1 Diabetes. The population-based approach uses data from a pool of patients to identify population as well as patient parameters of a model of the insulin-glucose system. This enables to consider more complex model structures, the intra- and inter-patient variability and to identify correlation between model parameters and other directly measurable patient data such as weight.
In previous projects, different population-based methods have been compared and a Matlab toolbox was developed to implement the combination of a stochastic model with a population-based approach. This implementation has mainly been tested with artificial data. The project consists in testing the approach using real clinical data. The results should include new model structures and improved approaches that allow more reliable predictions.
This project is carried out in collaboration with a multinational pharmaceutical company.
MER : Denis Gillet
Type of project: Semester
Student: Florent Xavier
Contact: Alain Bock and Gregory Francois
B043—————————————————————————————
Quotient-method controller for a ball-on-a-wheel system
This project deals with the control of a ball-on-a-wheel system and the comparison with existing methods. The setup consists of a ball placed on a grooved wheel that is driven by an electrical motor. The student will build the setup, which includes designing all the components, choosing the motor, designing a measurement technique to sense the position of the ball, and developing an interface using LabView. The objective is to balance the ball on the uppermost point of the wheel (i.e. at the unstable equilibrium point). The scope of the project is to (i) design and build the ball-on-a-wheel system, (ii) develop a simulation platform to compare various control strategies, and (iii) implement the quotient-method controller on the developed setup using LabView.
Professor: Dominique Bonvin
Type of project: Master
Student: Killian Daly
Contact: Willson Shibani and Philippe Müllhaupt
K017—————————————————————————————-
Simulation of a Car Equipped with Active Suspension
The main objective of this project is the simulation of a car equipped with an active suspension system driving on a test road. The active suspension should be designed to provide the comfort for the people in the car by ensuring good contact between the tires and the road. For successful fulfillment of this project the following tasks should be done:
1) Study of the existing literature and similar projects.
2) Choice of reasonable values for the physical properties of the vehicle, tire and road.
3) Writing the simulator for the system using C\C++, Matlab and/or LabView.
4) Definition of the test conditions and desired performance.
5) Controller design for the active suspension system using the existing methods and application of the controller on the simulator.
6) Writing the real – time simulator for the laboratory quarter – car model test bed, controller redesign for the test bed and application of the controller.
MER: Alireza Karimi
Type of project: Master
Student: Jakob Baader
Contact: Zlatko Emedji
K016—————————————————————————————
CHEOPS Attitude Determination and Control Software and Computer
This Work Package summarizes the work performed at the Space Center during phase A of the CHEOPS Project. The expected duration of the work is from 21-02-11 till 24-06-2011.
Organization, management and deadlines pertinent to this work can be found in the “CHEOPS Preliminary Project Management Plan” (Issue 1, Revision 2). Preliminary project specifications can be found in the “CHEOPS Preliminary Requirements Document” (Issue 1, Revision 3), and mission and orbital specific details can be found in the “CHEOPS Mission Plan” (to be published).
The general goal of this work package is to develop the Attitude Determination and Control algorithms, software and hardware (control computer) for the CHEOPS space system. This includes definition of the control modes (depending on the states of the satellite), quantification of the disturbances, selection of the type of control, and definition of the determination and control algorithms, and estimation of the overall weight and power consumption of the ADCS for all the different modes. This work package is related to WP4610 (ADCS Hardware) and is parent for WP4621 (ADCS Computer) and WP4622 (ADCS Algorithms and Software). The goal of this work package during Phase A is to determine algorithms that can be used to control CHEOPS space segment, quantify their complexity and prepare high-order design of computer architecture on which these algorithms will be implemented.
The organization of the CHEOPS Project is meant to provide participating students with a structured ESA/industry-like project experience and assure mission objectives success. Compliance with this organization will provide the best technical and human experience for the whole project team.
MER: Alireza Karimi (and Anton Ivanov from Space Center)
Type of project: Master
Student: Luzius Kronig
Contact: Stefano Gerussi