B029——————————————————————————–
Traffic flow control of Swiss railway network
The Swiss railway network is one of the densest railway networks in the world. The rail traffic follows fixed routes with different safety constraints to meet specific schedules. The traffic planning must be robust enough to handle unforeseen events like accidents and still meet scheduled times as closely as possible. The high volume of traffic makes human intervention unreliable and warrants for the development of automatic traffic controllers.
The aim of this semester project is to develop a model for the rail traffic which takes account of the various uncertainties in rail operation. The student will familiarize (her/)himself with basic traffic flow control paradigms and apply some of these to model and simulate the rail traffic. Later, some simple traffic flow control schemes may also be designed.
Professors: Dominique Bonvin
Type of project: Master
Contact: Saurabh Deshpande
Student: Loic Alexander
L015———————————————————————————
Vibration damping control for wire electric discharge machining
Wire Electric Discharge Machining (EDM) is a widespread technique for processing electrically conductive hard materials. During this process the erosion arises through melting and evaporation mechanisms produced by spark plasmas which are created between a wire electrode and the workpiece. In order to adapt the technology to increasing perturbations coming from high power sparks, strong flushing forces and the interaction of the electrode having an axial speed with the guiding system , a specific process control has to be set up so as to meet the constraints of stability and wire equilibrium for a high cutting speed performance and geometrical accuracy of the cut.
This project is carried out in collaboration with Charmilles Technologies SA.
Professor: Roland Longchamp
Type of project: Master
Contact: Gorka Galdos and Alireza Karimi
Student: Alain Bock
L025——————————————————————————–
Auto-tuning of a controller for a linear motor
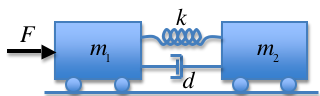
In many high-precision positioning systems using linear motors, the load has not a completely rigid connection with the carriage of the system. This can be represented by two masses connected together with a spring and a damper when only the position of the carriage is measured and the position of the load should be controlled (the load may be changed in different applications).
In order to design a good controller for this kind of systems, it is useful to identify the system parameters (the masses m1 and m2, the characteristics of the spring k and the damper d)and re-tune the controller parameters accordingly.
This project is composed of the following steps:
1. Propose auto-tuning methods to automatically identify the system parameters and to tune a controller based on a set of input/output data.
2. Validate these methods by simulation.
3. Apply these methods on a real system composed of a linear motor and different masses connected to the carriage of the linear motor.
This project is carried out in collaboration with ETEL.
Professor: Roland Longchamp
Type of project: Master
Contact: Marc Kunze and Alireza Karimi
Student: Nicolas Stoudmann
G047——————————————————————————–
Control of a reduced-scale automated guided vehicle
The laboratoire d’automatique has developed a reduced-scale AGV (automated guided vehicle) using four e-puck mobile robots constituting the four steering axles.
The first aim is to continue the adaptation of the hierarchical control and communication system coded in C and C++ language into a user-friendly LabView interface. The second goal is to integrate the results of an earlier project to be able to locate the vehicle in its environment and close the outer control loop for path following.
Real-time aspects have to be handled carefully in the whole project.
MER : Denis Gillet
Type of project: Semester
Contact: Sylvain Ruda
Student: Guillaume Monnard
L026——————————————————————————–
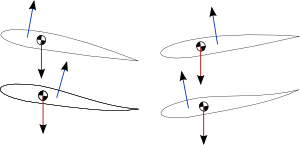
Control of a flying wing with non-autostable airfoil
Flying wings are planes (or gliders) without tail. The main interest of such designs is that the aerodynamic drag of the tail is absent, which is of special interest for gliders. However, to obtain passive pitch stability, a flying wing imposes the use of a so-called autostable foil profile. Unfortunately, autostable profile are known to be generally less efficient than classical ones, meaning that the ratio between lift and drag is smaller.
The goal of this project is to study theoretically and through simulation whether one can build a flying wing using a foil profile with negative autostability coefficient and stabilize it actively with control. The measurement should use only output from a (pitch)-gyroscope and from a Pitot-like tube (aircraft speed measurements). The project may also involve testing a prototype of such a Pitot tube.
Prerequisite: Interest in analytical (Lagrangian) dynamics, modeling and simulation. MATLAB.
Professor : Roland Longchamp
Type of project: Semester
Contact: Basile Graf and Philippe Müllhaupt
Student: Maurice Mueller
G041——————————————————————————–
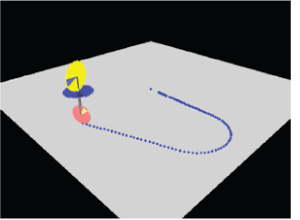
Control of a real unicycle robot
The Laboratoire d’Automatique is developing an autonomous unicycle robot. The system is supposed to stay vertically on its single wheel and move along paths. Preliminary results are available from previous projects. The dynamics have been modeled and controllers have been designed. A first choice of actuators and sensors have been made.
The goal of this project is to design a unicycle prototype and implement a controller able to stabilize the system vertically.
MER : Denis Gillet
Type of project: Master
Contact: Damien Perritaz and Basile Graf and Sylvain Rudaz
Student: Arnaud Moretti
G051—————————————————————————————

Optimal racing line computation for a Formula 1 car
The aim of this project is to develop an algorithm that accurately and efficiently predicts the optimum racing line for a Formula 1 car on a given circuit. Combined with a quasi-static lap simulation, the algorithm will be used to investigate the influence of car setup and performance indicators on optimal braking, turn-in, tip-in points and lateral curvature.
The project is carried out in collaboration with a Formula 1 Team.
MER : Denis Gillet
Type of project: Master
Contact: Basile Graf
Student: Constantin Niemeyer
L027———————————————————————————
Robust controller design for a torsional system
Robust controllers are designed to stabilize and satisfy the performances for a set of models. This type of controllers can be applied to nonlinear systems linearized at different operating points as well as to systems with parametric uncertainty. An approach to robust control design is to cast the problem into a convex optimization problem which can be solved efficiently using numerical methods.
The objective of this project is to design a robust controller which stabilizes all possible configurations of a torsional system and satisfies some performance specifications (rise time, overshoot, modulus margin, delay margin, etc) using a design method developed at the laboratoire d’automatique. The method is based on open-loop shaping in the frequency domain using a set of non-parametric models.
First, the nonparametric model identification will be carried out for different configurations of the system (weights in pulleys). Then, the method will be used to design a controller meeting the specifications and will be applied to the experimental setup.
Professor: Roland Longchamp
Type of project: Master
Contact: Gorka Galdos and Alireza Karimi
Student: Fabian Fellay
G045——————————————————————————–
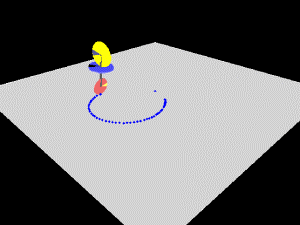
Advanced control strategies for a unicycle robot
The Laboratoire d’Automatique is developing an autonomous unicycle robot. The system is supposed to stay vertically on its single wheel and move along paths. Preliminary results are available from previous projects. The dynamics have been modeled and controllers have already been designed.
The goal of this project is to develop advanced control strategies to improve the performance of the nonholonomic unicycle robot moving along paths.
MER : Denis Gillet
Type of project: Semester
Contact: Damien Perritaz and Basile Graf and Sylvain Rudaz
Student: Sebastien Mamin
G048——————————————————————————–

Flexible user interfaces in social softwares
Within the Palette European project, the laboratoire d’automatique has developed a social software called eLogbook. This software provides advanced features to help users organize their community. The objective of this project is to enhance the user interface and to provide additional views to them.
The student should be familiar with Web technologies (Javascript, JS framework) or strongly willing to learn them.
There can be more than one candidate for this project.
MER : Denis Gillet
Type of project: Semester
Contact: Evgeny Bogdanov and Christophe Salzmann
Student: Jeremy Nguyen Xuan
B023——————————————————————————–
Comparison of control strategies for magnetic levitation system
The magnetic levitation system considered in this project is nonlinear and open-loop unstable. It consists of a coil providing the magnetic force and a metal ball which is to be levitated. The position of the ball is measured with a distance sensor (laser system).
The force of the magnetic field depends on the distance from the coil. This is the main source of nonlinearity in the system. The goal of this project is to compare different control strategies for this system, e.g. local linearization, global linearization. The different approaches will be implemented using Labview and an easy-to-use interface will be developed for the approaches considered.
Professor: Dominique Bonvin
Type of project: Semester
Contact: Klaske Van Heusden and Alireza Karimi
Student: Heloise Gremaud
B019———————————————————————————
On-line monitoring of nonlinear processes
First-principle modeling is a difficult task for nonlinear processes. However, often a large amount of sensor data is available, which can be used to build black-box models (e.g. Neural Network – Partial Least Squares (NN-PLS)) for the prediction of important variables such as process quality and concentrations.
The student will study NN-PLS and apply it to simulated infrared spectroscopic data from a fermentation process for the on-line prediction of glucose concentrations. The goal of the project is also to apply the same methodology to real data from a Holcim cement plant for the prediction of cement quality.
The student will work with MATLAB for simulation and monitoring.
Professor: Dominique Bonvin
Type of project: Semester
Contact: Paman Gujral and Michael Amrhein
Students: Enrique Guzman and Davyd Dacruzchivala
G046——————————————————————————–
Control of a multi-agent system
The goal of this project is to apply different control techniques to the crossing problem of autonomous robots. Collision-free motions have to be designed taking into account several constraints like energy aspects.
The project will have a rather theoretic orientation and will be undertaken in simulation using Matlab. However, an implementation on e-puck robots is possible at the end of the project.
MER : Denis Gillet
Type of project: Semester
Contact: Sylvain Rudaz
Student: Hajir Roozbehani