Please visit the new page here
- For more information about the projects, please contact the “contact” person for each project.
- For registration please contact the secretary of lab Mme. Benassi.
- For Internship + PDM in indusry, please contact Dr. Alireza Karimi.
J030——————————————————————————–
 Modeling and control of a collision-resilient flying robot
Modeling and control of a collision-resilient flying robot
This project will be carried out in collaboration with an EPFL spin-off developing new types of flying robots equipped with innovative protective frames (for example, see: video).
These platforms are capable of interacting with obstacles and are safe to fly close to humans, opening new fields of application for flying robots.
The interaction between the inner frame, the protective frame and the obstacles offer new control challenges, in particular for the stabilization of trajectories in the air or while in contact with obstacles.
Within this Master project, the candidate will model the flying robot, analyse the controllability, propose a control strategy, and (if time allows) implement it on the real platform.
Professor: Colin Jones
Type of project: Semester or Master
Contact: Jean-Hubert Hours, Faran Qureshi and Adrien Briod
B058——————————————————————————
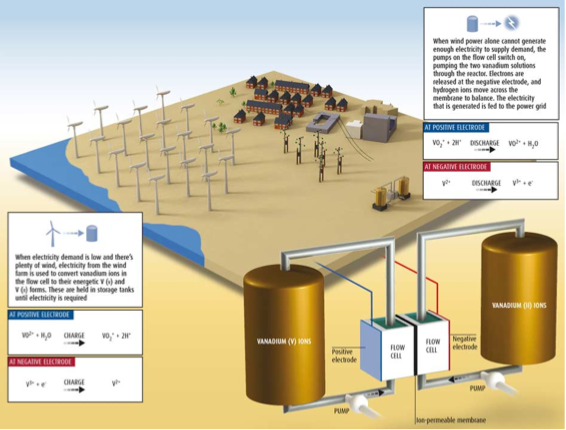
Optimization of a Redox flow battery for hydrogen generation
In the development of efficient smart grid technologies, fast and reliable storage of electrical excess energy provided by the grid is key to ensure efficiency.
This project is in collaboration with the Laboratory of Physical and Analytical Electrochemistry of Prof. Hubert Girault and the electricity distributor Sinergy in Martigny. It is proposed to investigate the potential of dual-circuit redox flow batteries as a storage mean for electrical excess energy. The project includes:
- Development of a basic dynamic model of a redox-flow battery;
- Formulation of a dynamic optimization problem to minimize the losses for varying load profiles;
- Numerical solution to the optimization problem;
- Verification on a real system available at Martigny
Requirements : Suitable candidates should have a good background in control and optimization. Basic knowledge of thermodynamic and electrochemistry would be a plus. This project is intended to start as soon as possible.
Professor: Dominique Bonvin
Type of project: Master
Contact: Timm Faulwasser
J029——————————————————————————–
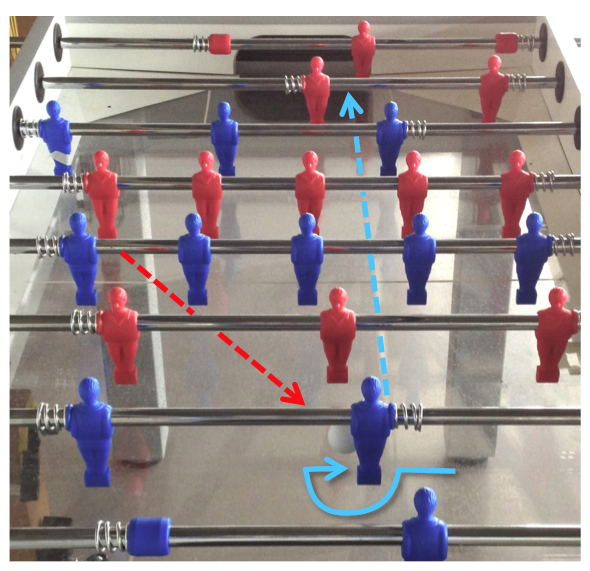 Coaching babyfoot players
Coaching babyfoot players
A babyfoot has been modified over the previous semesters to actuate 2 arms (goal keeper and defenders). The system is able to track the ball, stop it (most of the time) and kick it back to the opponent goal.
The aim of this project is to design and test strategies to beat the human opponent. If needed the existing hardware can be upgraded. This project is mainly a programming project.
This project may be split up into 2 semester projects.
Professor: Colin Jones and Christoph Salzmann
Type of project: Semester
Contact: Milan Korda
K032——————————————————————————–
 Multidimensional axes control for sub-micron accuracy positioning
Multidimensional axes control for sub-micron accuracy positioning
A Coordinate Measuring Machine (CMM) is a robot used by manufacturing companies to measure the dimensions of an object in 3D with sub-micron accuracy. A CMM dynamically measures complex geometries by the mean of a sensing element, three linear continuous axes and up to 4 rotational continuous axes (seven in total). The main challenge is to maximize throughput (i.e., cycle measurement time) without decreasing the measurement accuracy, even for complex parts to scan. To achieve this goal, the motion control algorithm is the key element. Therefore, the goal of this project is to design, test and validate a multi-input multi output MIMO motion controller for multidimensional axes with ultra-high accuracy positioning taking into account the following concerns:
- The mechanical dynamic coupling of motion axes.
- The optimization of performance in trajectory tracking, considering the mechanical constraints (e.g., jerk, vibration).
The student should consider different control structures (PID, RST, state-space) and different control methodologies (optimal, robust, adaptive) to optimize the underlying control system.
Requirements: Interests & knowledge in advanced control systems
This project is carried out in collaboration with Hexagon Metrology on the site of Tesa (Renens).
MER: Alireza Karimi
Type of project: Master in industry
Contact: Alireza Karimi
J022——————————————————————————-
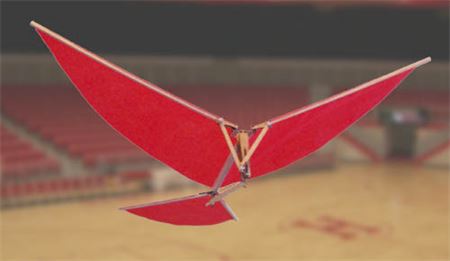 Modeling and control of a flapping wing aircraft (Ornithopter)
Modeling and control of a flapping wing aircraft (Ornithopter)
Biological flyers, such as ornithopters, use different means of propulsion than human engineered air vehicles. In specific they use flapping wings instead of spinning blades to move and steer. This allows them to be lightweight and highly manoeuvrable. They also present an interesting case for studying nonlinear system dynamics and control in periodic settings.
Nonetheless, the aerodynamic forces generated by flapping are not easily quantifiable. The project aims in modelling the unknown ornithopter dynamical system starting from first principles and moving towards model identification and learning techniques through experimental testing. The second part of the project will focus in synthesising a controller that employs the developed model and exploits the periodic properties of the system.
Professor: Colin Jones
Type of project: Semester
Contact: Sanket Diwale and Ioannis Lymperopoulos
B054——————————————————————————–
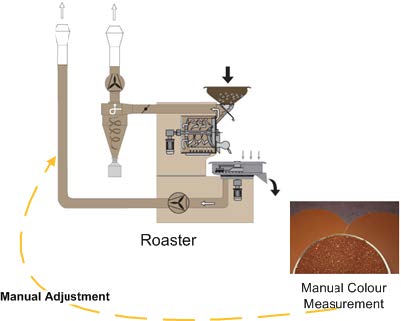 Automation of a roasting process
Automation of a roasting process
Roasting is a key process in the production of coffee. The degree of roasting affects the color, which is measured “manually” and used to adjust roasting parameters such as the final temperature and the roasting duration. Manual measurements are time consuming and delay the adjustment of process parameters.
The objective of this project is to automate this manual process in two steps:
- Predict online the coffee color based on measured process parameters using a multivariate calibration model;
- Adjust the process conditions to keep the color on target.
The student will analyze the process, develop a calibration model to relate color to process parameters, write a dynamic model of the roasting process and propose an advanced control strategy to meet the quality target. Benefits will be assessed by comparing the proposed solution to current practice. This project will be carried out in collaboration with Nestlé in Orbe, Switzerland
Professor: Dominique Bonvin
Type of project: Master or Master in industry
Contact: Dominique Bonvin or Julien Billeter
J024——————————————————————————-
 Robotic monitoring and surveillance
Robotic monitoring and surveillance
Patrolling techniques have always been used from people to cover important tasks such analysis of changes in the territory, surveillance of sensible areas, or agriculture monitoring. With the striking increase of cheap drones in the market, automated patrolling becomes everyday more popular.
The goal of this project is to investigate and implement state of the art techniques for automated patrolling, where one or more vehicles are assigned to patrol a given area.
Professor : Colin Jones
Type of project: Semester or Master
Contact: Andrea Alessandretti
L047——————————————————————————-
 Optimal control of a hydrofoil boat
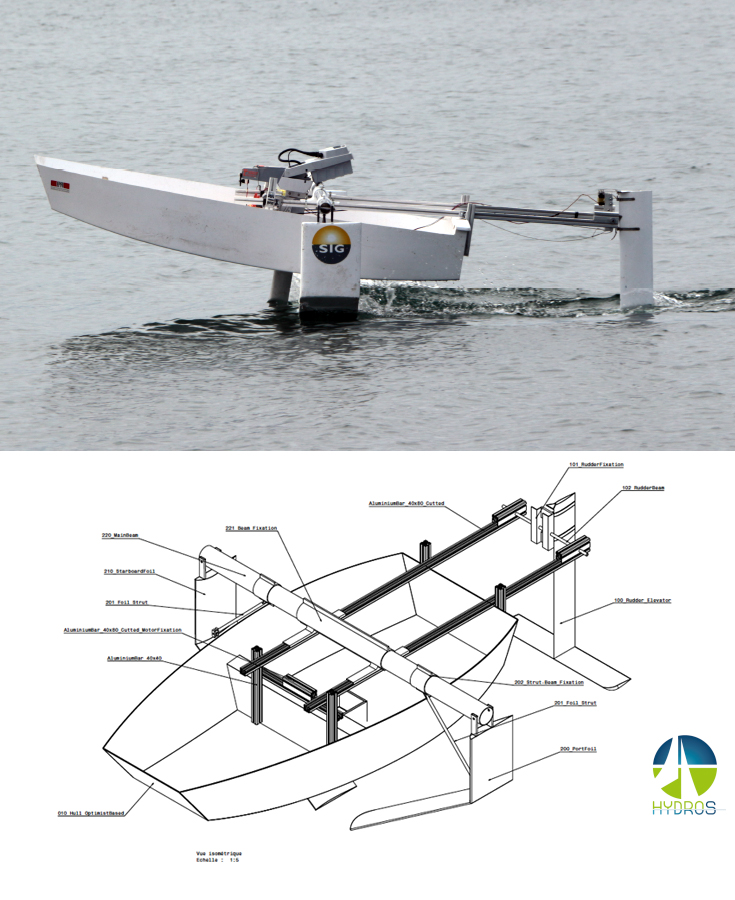
Optimal control of a hydrofoil boat
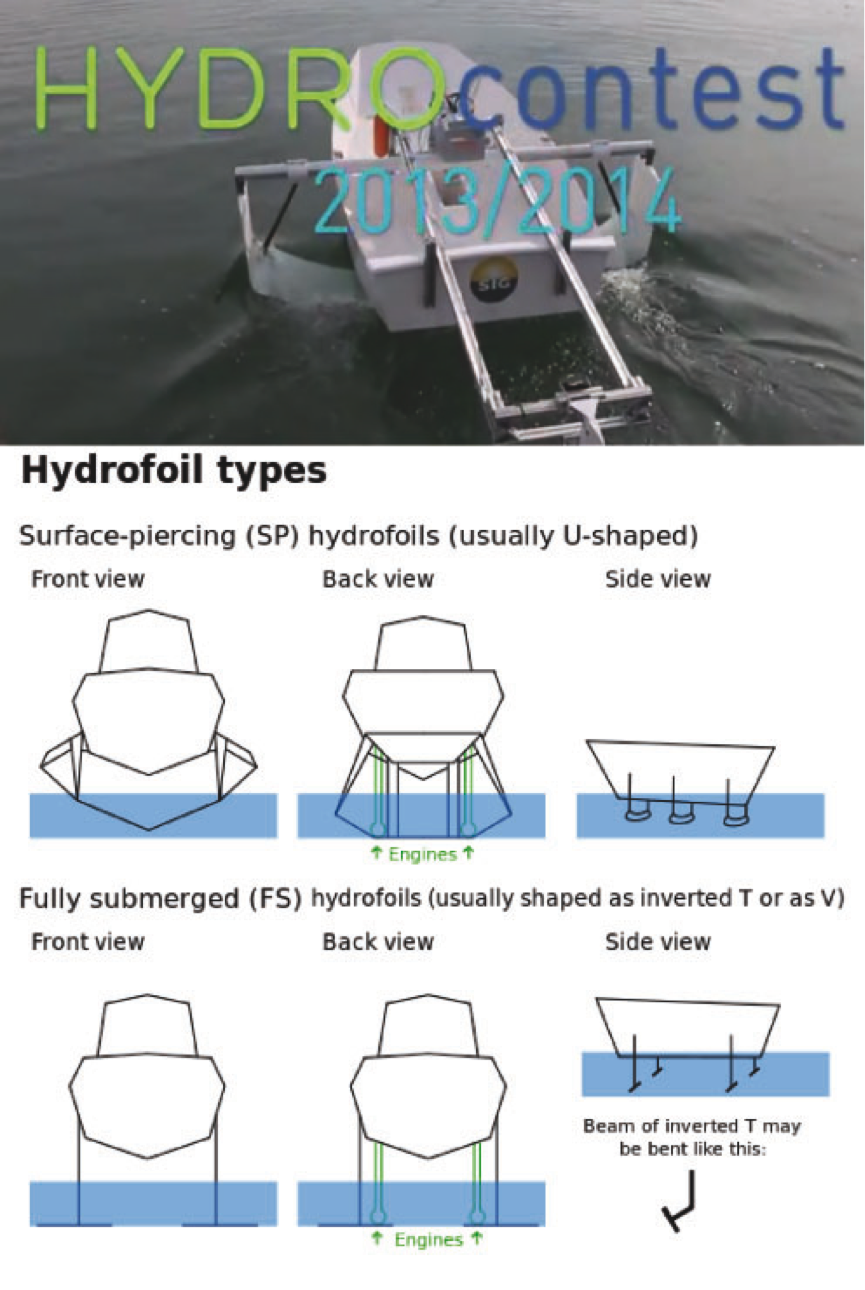
HYDROS, the Swiss scientific research center specialized in sailing, is holding an engineering competition to take place in lake Léman, summer of 2014 (see link). The goal is the construction of an energy efficient hydrofoil boat. EPFL has forged a group of teams that specialize on optimizing each of the specific components of the system. LA is responsible for the dynamical modeling of the boat in order to plan effective trajectories and track them in the face of uncertainties.
The first part of the project focused in modeling the boat dynamics and discovering the optimal control policies in simulation. The second part, due to start in the next spring semester, is going to explore the interaction of the boat with the environment in a realistic setting. Model-mismatch and external disturbances might deem the control policies suboptimal or even infeasible. The project will focus in robustifying the system against uncertainties.
Professor : Roland Longchamp and Colin Jones
Type of project: Semester / Master
Contact: David Ingram, Andrea Alessandretti, Philippe Mullhaupt, Ioannis Lymperopoulos
K031—————————————————————————

LPV control of a 3-DOF Gyroscope
Three Degrees of Freedom (3-DOF) Gyroscope is a laboratory setup used for presenting challenges related to rotational dynamics. In practice Gyroscopes are used in space vehicle attitude control, momentum wheel control, navigation, satellite orientation, autopilot systems (and you can find them even in smartphones).
The dynamic model of a Gyroscope depends linearly on the speed of its main rotary disk. If the spped of the rotary disk varys with time the model of the system becomes a Linear Parameter Varying (LPV) system.
The objective of this project is to design a Linear Parameter Varying (LPV) Controller for the 3-DOF Gyroscope available in Automatic Control Laboratory of EPFL. In the first step an LPV model for the Gyro will be developed. Then an LTI robust controller will be designed for the system. Finally, an LPV controller will be designed to improve the performance. Obtained controllers will be tested in simulation and real-time experiment, using LabView.
Good knowledge of Matlab and basic knowledge of LabView are needed.
MER: Alireza Karimi
Type of project: Semester
Contact: Zlatko Emedi
B042——————————————————————————

Control of an experimental kite system
At high altitudes wind is considerably stronger, more stable and more consistent than wind close to the ground, making it an extremely promising, untapped source of energy. The problem is that the energy is several kilometers from the surface of the earth and constructing wind turbines 2 km tall is infeasible. A host of innovative ideas have been proposed for accessing high-altitude wind, such as floating turbines, self-sustained spinning foils and giant balloons. Kites appear to be one of the most promising (and realistic) means of harnessing this energy.
The primary goal of this project is to design and implement an automatic control system for a kite using a control and sensing unit that has been built in our lab. Practical tests will be carried out in the vicinity of the EPFL. An elementary controller has already been implemented, but it lacks robustness to noise, perturbations and delay. In this project an advanced controller (probably a Model Predictive Controller) will be designed, coded (Matlab or C) and tested.
This project is for students with a good knowledge of Control Theory and Matlab.
Professor: Dominique Bonvin
Type of project: Master or Semester
Contact: Sean Costello
J021——————————————————————————–
 Fast optimization on FPGA
Fast optimization on FPGA
Model Predictive Control has proven very efficient at handling constraints. Yet it requires solving a quadratic programming (QP) at each sampling time, which can be challenging for fast and complex dynamics.
FPGA implementation is a promising direction for coping with this challenge, as they can be customised to specific applications and parallelisation can be exploited further.
The project will be focused on implementing algorithms for solving a specific class of structured QPs on FPGA, such as fast gradient or projected successive over relaxation. An output of the project should be a set of FPGA functions for simple linear algebra operations. The developed algorithms can then be tested on a real application in power electronics or autonomous vehicles. Skills in VHDL, FPGA programming and optimisation are a plus.
Professor: Colin Jones
Type of project: Semester or Master
Contact: Jean-Hubert Hours and Faran Qureshi
L044——————————————————————————-
Modeling sports vehicle dynamics
The NISSAN GTR is a sports car which on paper has lower performance than most of its competitors such as the Jaguar XKR S, Porsche 911, etc… However, because of the electronic control systems it uses to manage the different parts of the car, (motor, gear box, suspension, breaks, etc…) it is able to beat it’s competitor on almost every level. It’s launch control system allows it to go from 0 to 100 km/h in 3 seconds. Its suspension management system allows it to go through corners at higher speeds. Thus, the NISSAN GTR really shows the advantages of using control to optimize the performance of a car.
The aim of this project will be to model a car in the general sense using the MATLAB/SIMULINK environment. Once a model is available, the performance of the car it to be analyzed and finally controlled.
Professor : Roland Longchamp
Type of project: Semester
Contact: David Ingram
J025——————————————————————————-
 Cooperative target tracking
Cooperative target tracking
The estimation of the position of a moving vehicle is crucial task that is at the base of the design of any target following controller.
In this project we will investigate control strategies to drive and coordinate multiple followers vehicles in a smart way to track the target while obtaining a good quality of the estimation of the target position.
Professor : Colin Jones
Type of project: Semester or Master
Contact: Andrea Alessandretti
K029——————————————————————————–
 Vibration control in high precision wire EDM
Vibration control in high precision wire EDM
The Wire Electro Discharge Machining (WEDM) is a non-conventional machining technology using micro-electrical discharge. This technology is used for machining of extremely hard materials with accuracies of the order of microns and is widely used in medical, aerospatial, electronic and communication industries.
To obtain a surface finish of order 0.04 micron Ra, a high performance controller should be used to reject all mechanical disturbances that may generate undesired effects on the surface of the workpiece. The main problems come from the wire vibrations during its unrolling for wear compensation. The aim of this work is to measure the frequency of the vibration by an external sensor and design an actuator for the compensation of the vibration. The whole control system (sensor, controller, actuator) should be validated by a high precision industrial application.
MER: Alireza Karimi
Type of project: Master in industry
Contact: Alireza Karimi
J006——————————————————————————-
 Real-time MPC on Android
Real-time MPC on Android
Modern smartphones have superior computational and sensor capabilities. Thus they are very interesting for being used as autopilots on autonomous vehicles. Their computational power also enables the use of optimization software with the same expected performance as on a normal PC. This makes them very interesting in an MPC context, in comparison to embedded platforms.
The goal of the project is to extend the development of an android application (started in a previous project) for running fast optimization code and use MPC to control non-holonomic vehicles. The first part of the project will be devoted to simulating real-time MPC schemes on non-holonomic systems. An output should be a benchmark of existing real-time NMPC algorithms (RTI, GMRES continuation,…) and possibly a comparison to real-time NMPC strategies developed in the lab. The real-time algorithm should then be implemented on android to control a hovercraft.
Professor: Colin Jones
Type of project: Master
Contact: Jean-Hubert Hours and Ye Pu
K030—————————————————————————-
 Reference tracking for magnetic levitation system using LPV controller
Reference tracking for magnetic levitation system using LPV controller
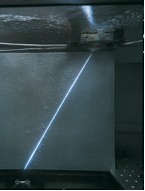
The magnetic levitation system considered in this project is nonlinear and open-loop unstable. It consists of a coil providing the magnetic force and a metal ball which is to be levitated. The position of the ball is measured using a laser-based distance sensor.
The force of the magnetic field depends on the distance from the coil in a nonlinear manner, and this is the main source of nonlinearity in the system. The aim of this project is to design a Linear Parameter Varying (LPV) controller for the problem of tracking reference signal that changes abruptly in time (e.g. square wave signal). This system is a Linear Parameter Varying system, as the model parameters depend on one of the states (position). Guaranteeing stability of the closed-loop system with LPV controller in the loop is not trivial. Different LPV controllers will be designed and tested in both simulations and real-time experiments. To increase the operating range, different techniques will be examined (e.g. smoothing the reference and designing an LPV controller able to handle appropriate position variation rate). Robustness to the measurement noise may have to be treated in the design as well. The final goal is to obtain an LPV-based control law able to control the levitating ball subject to fast and large reference position changes.
Good knowledge of Matlab and basic knowledge of LabView are needed.
MER: Alireza Karimi
Type of project: Master or semester
Contact: Zlatko Emedji
J023——————————————————————————–
 Path following control of hovercraft
Path following control of hovercraft
On this project we intend to exploit the great potential of modern smartphones as computational platforms and of its integrated components, such as Wi-Fi, Bluetooth, GSM, accelerometers, GPS, gyroscopes, compass, etc.
Path-following control is the problem of autonomously driving a vehicle along a path, which is one of the most ubiquitous tasks that autonomous vehicle perform. The applications range from sea floor mapping to control of Mars rovers. The hovercraft, a non-holonomic vehicle with large drift, constitute an excellent platform to implement and test path-following control algorithms.
The goal of the project is to integrate available software and hardware to control a scale hovercraft with a smartphone and implement path-following algorithms on the Android environment. The project may follow the steps below:
- Complete the software and hardware setup development.
- Parameter estimation of model of the hovercraft.Survey techniques for time-continuous path-following.
- Code the path-following algorithm in Java.
- Document the performance of the setup.
Requirements: Good background in Java programming.
Professor: Colin Jones
Type of project: Semester or Master
Contact: Francisco Rego, Jean-Hubert Hours and Faran Qureshi
L046——————————————————————————
Control of cable-driven robots
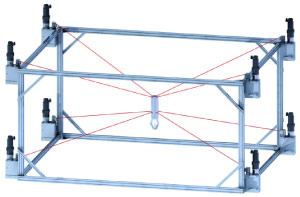
A cable-driven robot is a robot manipulator driven by a set of cables. To actuate each degree of freedom a minimum of two cables are required. Thus, the system is highly over-actuated. There exist two types of systems. Suspended manipulators where the manipulator is a suspended platform is a network of cables and non-suspended manipulators which have un-actuated mechanical links between the manipulator and base. The advantage of such systems is the high degree of over-actuation. However, cables can only pull and this can severely restrict the system’s workspace.
The goal of this project is to model a non-suspended manipulator, analyse the wrench feasibility workspace and propose a control strategy.
Professor : Roland Longchamp
Type of project: Semester / Master
Contact: David Ingram
J020——————————————————————————–
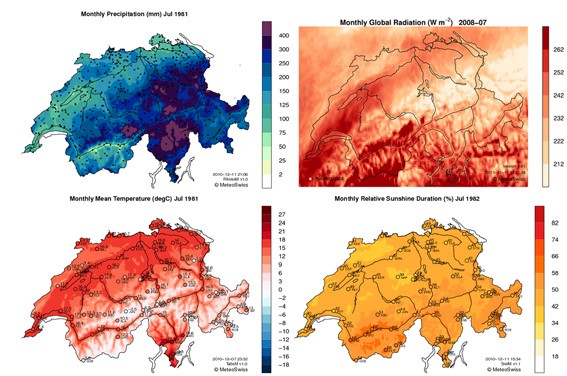 Data-based weather prediction models for control
Data-based weather prediction models for control
In order for a building to be able to participate in a demand-response program, as part of a smart grid, a model of its thermal/electrical behaviour is required, along with the predictions of external factors. These factors (solar radiation, wind, outside temperature etc.) can seriously affect the quality of the control policy generated from the building controller, practically rendering the control scheme invalid in case of high uncertainty.
Incorporating the stochastic model of the weather prediction in control design can improve the performance of the system. Usually the weather forecasts are available, but are not very accurate. The goal of this project is to develop weather prediction models using historic weather measurement, and weather forecast data. These models will be used in a subsequent stage in order to develop more accurate predictive controllers.
There are several data-based techniques to develop prediction models in the absence of physical intuition, e.g. by means of Gaussian Processes. The interested student will be expected to develop prediction models using different machine learning techniques, and evaluate their performance. A strong mathematical background and experience in implementation of algorithms in Matlab is necessary.
Professor: Colin Jones
Type of project: Semester
Contact: Faran Qureshi, Tomasz Gorecki, Georgios Stathopoulos and Altug Bitlislioglu
J027——————————————————————————-
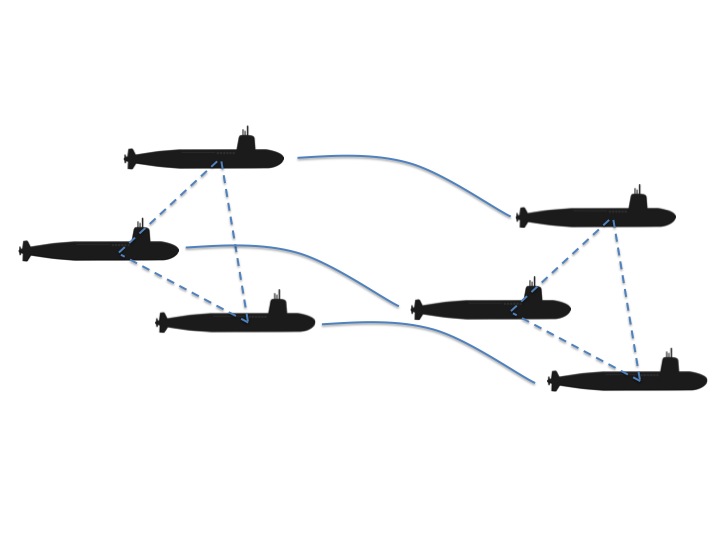 Formation keeping with range only estimation
Formation keeping with range only estimation
In order to perform formation keeping, crucial information is the relative position among vehicles. When only range measurements are available, e.g., sonars this information might be difficult to obtain or it might have a low quality.
In this project we will investigate control strategies to drive and coordinate multiple vehicles along a path while keeping formation and estimating each other position.
Professor : Colin Jones
Type of project: Semester or Master
Contact: Andrea Alessandretti and Francisco Rego
K028—————————————————————————-
 Measurement-based optimization of the parameters of EDM machining
Measurement-based optimization of the parameters of EDM machining
The Electro Discharge Machining (EDM) is a non-conventional machining technology using micro-electrical discharge. This technology is used for machining of extremely hard materials with accuracies of the order of microns and is widely used in medical, aerospatial, electronic and communication industries.
The new production needs, require the optimization of the machining parameters of the micro-sparks (duration, intensity, working distance, breakdown voltage, etc.) for a predefined precision, surface finish and material removal. Since the relation between the desired performance and the machining parameters is highly nonlinear and inexact, the classical optimization methods do not lead to good results when applied on the real system. The aim of this project is to develop a new optimization method that based on a finite number of measurements can lead to an optimal or suboptimal solution in a short period of time. The optimization method should be implemented on the computer controlled system of an EDM sinking machine and validated via an industrial application.
MER: Alireza Karimi
Type of project: Master in industry
Contact: Alireza Karimi
B052——————————————————————————

Analysis of software tools for dynamic optimization
Many engineering problems require the solution of optimal control problems. For instance, optimal trajectories for chemical processes, robotic manipulators or rackets are computed by means of dynamic optimization. From a control point of view, dynamic optimization refers to problems in which a cost functional is minimized while respecting dynamic as well as path and terminal constraints.
The main objective of this project is the assessment of different open-source software tools tailored to solving dynamic optimization problems via Matlab or Scilab. The main task of the student will be to investigate simple benchmark problems and compare the implementation efforts of different toolboxes. Suitable candidates should be interested in optimization in general. Previous experience with Matlab would be advantageous. However, in depth knowledge of dynamic optimization is not required, as this project provides an excellent opportunity to acquire such knowledge. This project is also suited as preparation for a master thesis in the field of dynamic optimization.
Professor: Dominique Bonvin
Type of project: Semester
Contact: Timm Faulwasser
J026——————————————————————————-
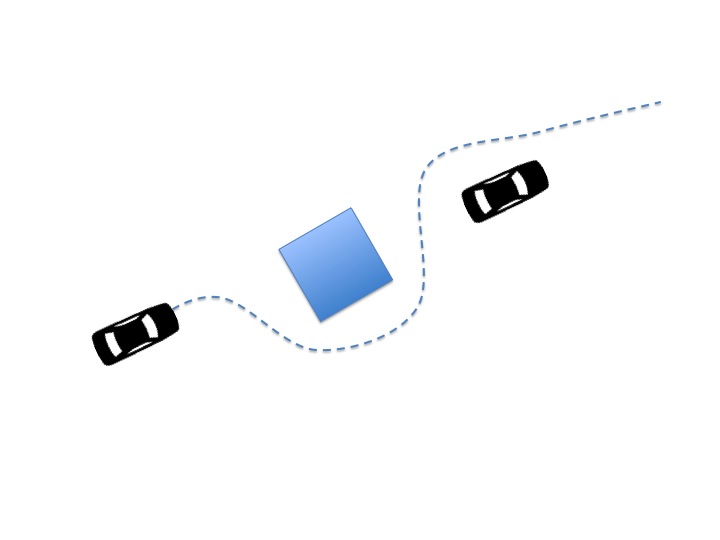 Collision avoidance control design
Collision avoidance control design
A fundamental component of any autonomous vehicle is the ability of moving in cluttered enjoinment avoiding possibly moving obstacles.
In this project we will investigate and implement state of the art collision avoidance strategies and investigate potential improvements using optimal control techniques.
Professor : Colin Jones
Type of project: Semester or Master
Contact: Andrea Alessandretti
L045—————————————————————————
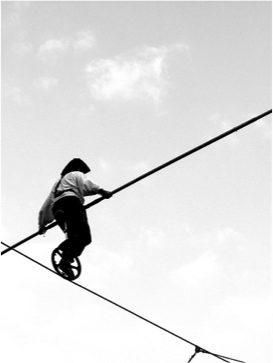
Modeling and control of the circusbot
Many circuses propose an act where a person rides a unicycle across a wire usually holding a long pole. The pole is there to add stability to the system without which the act becomes virtually impossible due to high instability of the system (unicycle & rider). Adding a pole lowers the center of gravity of the system making it easier to stabilize.
The circusbot is a 2-dimension model of the rider and unicycle. The goal of the project is to model the system, apply a control strategy and implement on a physical test bench.
Professor : Roland Longchamp
Type of project: Master
Contact: David Ingram
K026——————————————————————————-
 Hydro power plant identification for performance monitoring
Hydro power plant identification for performance monitoring
In a context of performance monitoring and diagnostics for hydroelectric power plants, EDF Hydro Engineering Center in France wish to have a performance monitoring software in order to optimize plant maintenance and insure contractual compliance. The process to consider is a generating unit consisted of a hydraulic turbine, a generator, a controller and a SCADA (supervisory control and data acquisition) system. It can be seen as a linear dynamic MISO system (2 inputs and 1 power output) with varying parameters.
The goal of this project is to develop a robust identification algorithm taking into account :
- Low energy excitation of one input,
- Dependence of varying parameters to a known measured value (scheduling parameter),
- Nonstationary disturbances (drift, outliers, etc.) on inputs and outputs.
Requirements: Interests in system identification and estimation theory.
This project is carried out in collaboration with EDF in France (Le Bourget du Lac) with the possibility of internship.
MER: Alireza Karimi
Type of project: Master or Master in industry
Contact: Alireza Karimi
J024—————————————————————————
Polynomial optimization toolbox
This project will develop a Matlab toolbox for polynomial optimization, which is an emerging field of numerical mathematics founded on powerful theoretical results form real algebraic geometry. Applications of polynomial optimization permeate almost all branches of computational science ranging from control engineering, machine learning and computer vision to economics, graph theory and mathematical biology.
The software toolbox developed will provide a unified framework for modeling polynomial optimization problems, facilitating the use of these powerful tools by a broad scientific community. The focus will be on numerical efficiency of the implementation as well as clarity of the user interface.
Solid familiarity with programming in Matlab and a working knowledge of linear algebra are a necessary prerequisite for this project.
A student successfully completing the project will learn how to design scientific software, including writing an efficient numerical code and creating a user-friendly interface. In addition the student will acquire a basic understanding of polynomial optimization and a solid knowledge of computational mathematics.
Professor: Colin Jones
Type of project: Master or Semester
Contact: Milan Korda
B050——————————————————————————–
Predictive path following for an industrial robot
The design and implementation of task specific control schemes for robot motion are usually done via a rather complicated 3-step procedure. Firstly, the task requirements are translated into a geometric reference description, i.e. a task specific tool path is computed via inverse kinematics. Secondly, this path is converted into a reference trajectory via a speed assignment. And finally this trajectory is tracked by means of a feedback controller.
In this project we aim at a simplified task specific controller design that overcomes the limitations of the standard procedure. More precisely, we want to use nonlinear model predictive control to design a predictive path-following controller. Predictive path following is based upon the idea that controller can adjust the velocity along a geometric reference online, i.e. during the runtime of the process.
This project deals with the simulation-based design and evaluation of a predictive path-following controller for an industrial robot with 4 or 6 degrees of freedom. A detailed model of the considered robot is available. The main objective is a Matlab implementation of the controller which allows to assess the performance.
The project involves a Matlab implementation of the controller. Thus a solid knowledge of Matlab is recommended, and basic knowledge of C and Python would be helpful. Introductory literature on predictive path following is available upon request.
Professor: Dominique Bonvin
Type of project: Master or Semester
Contact: Timm Faulwasser
J011————————————————————————–
 Beating the system
Beating the system
It is a mathematical fact that in the game of roulette the player always loses against the casino in the long run (as long as there is an upper bound on the size of the bet). The question is whether we can get a statistical edge over the casino by exploiting the physics of the game. Indeed, the rules of the game allow to place bets for a certain amount of time after the ball has been thrown in the wheel. Therefore, the player should be able to extract information on where the ball is going to land by observing the speed and position of the ball relative to the wheel, thereby biasing the odds in his/her favor. This conjecture has already been independently proven correct (see here), claiming to achieve an 18 % statistical edge.
The project will involve image processing (of the image of the ball and the spinning wheel), physical modeling of the ball’s trajectory and/or machine learning. Familiarity with these concepts and Matlab environment is recommended.
Professor: Colin Jones
Type of project: Master
Contact: Milan Korda
J018—————————————————————————-
 Forecasting and Controlling of Financial Bubbles
Forecasting and Controlling of Financial Bubbles
There have been claims [1] that simple models can predict financial bubbles. These models postulate that such bubbles exhibit super-exponential growth (of price, volume, etc). One explanation for this is the herding behaviour of traders that creates positive feedback. However, eventually this growth becomes unsustainable and at a critical time leads to the bursting of the bubble and the crash of the price.
With this project we aim to replicate the bubble forecasting methods, verify their predictive power for different sets of data and finally design a control strategy that can ameliorate the effect of the bubble bursting using modern control methods.
[1] A. Johansen, O. Ledoit, D. Sornette, “Crashes as critical points”, International Journal of Theoretical and Applied Finance 3 (2000) 219–255.
Professor: Colin Jones
Type of project: Semester
Contact: Ioannis Lymperopoulos, Milan Korda
B046——————————————————————————
 Modeling of surface catalytic reaction systems using the concept of extents
Modeling of surface catalytic reaction systems using the concept of extents
Modeling of chemical reaction systems is an important step for the monitoring, control and optimization of industrial processes. This is especially the case for surface catalytic processes where highly selective compounds are desired. Such a kinetic model typically describes the kinetics, the transport phenomena (mass transfer, adsorption of reactants, desorption of products) and the operating conditions of the reaction system. A number of challenges arise in the modeling of surface catalytic reaction systems. One such challenge is determining whether the reaction system is mass-transfer, diffusion or reaction limited and whether one or more types of active sites are involved in the surface catalysis.
For the analysis of surface catalytic reaction systems, it is important to separate the effects of the transport phenomena and of the reactions. A methodology called ’Extent-based Incremental Identification’ has been developed by the Laboratoire d’Automatique to separate the effects (called extents) of reaction, mass transfer, and inlet and outlet flows for homogeneous and gas-liquid reaction systems. The decoupled effects can then be used for model identification purposes.
This project will extend the methodology of ’Extent-based Incremental Identification’ to gas-solid or gas-liquid-solid reaction systems involving a catalytic process at the surface of a solid catalyst. Such an analysis will require to formulate the Langmuir-Hinshelwood-type kinetics using the concept of extents. During this project, the student will learn the state of the art in simulation of chemical reaction systems, model identification and parameter estimation using a Matlab programming environment.
Professor: Dominique Bonvin
Type of project: Semester or Master
Contact: Julien Billeter and Sriniketh Srinivasan
J009——————————————————————————–
 System identification methods for building room temperature control
System identification methods for building room temperature control
Efficient control of buildings has potential for substantial energy savings. The traditional control strategies in building automation strongly rely on PID controllers. Model predictive control (MPC) provides a framework which can help us optimise the energy consumption in buildings, while maintaining high comfort for the occupants. One of the challenges in designing a MPC controller is to obtain a simple enough yet representative model of the building. On the other hand, building modelling software can provide very detailed models. Nevertheless, these are inappropriate for control purposes.
This project aims at investigating the different modelling methods for buildings including system identification, in order to obtain a representative model of a building room which could be used for MPC. The project will be carried out in collaboration with our industrial partners Sauter AG.
Professor: Colin Jones
Type of project: Semester, Master or Master in industry
Contact: Faran Qureshi, Tomasz Gorecki, Georgios Stathopoulos and Altug Bitlislioglu
B043——————————————————————————–
 Incremental Kinetic Identification of Polymerization Reaction Systems
Incremental Kinetic Identification of Polymerization Reaction Systems
Kinetic models are necessary to gain a better understanding of the underlying chemical reactions and monitoring and control, and optimization of the reaction system. The models contain information regarding the chemical reactions, transport processes and the operating conditions of the reactor.
One of the techniques available for model identification in chemical reaction systems is the extent-based incremental approach. Here, the effects of reactions, mass transfers, inlets and outlets are decoupled from each other as individual extents. These extents can then be used to identify a suitable model, thereby reducing the correlation between the different parameters present in the kinetic model.
Polymerization process involves chemical reactions where individual monomer molecules react to form long polymer chains or polymer networks of very high molecular weights. These reactions proceeds by three successive steps: initiation, propagation and termination. The main difficulty in identifying a reliable model depends on successful modeling of the propagation step due to the presence of a large number of reactions. This project will focus on utilizing the incremental identification technique on polymerization reaction system for model identification. During the course of this project the student will learn to simulate and model chemical reaction systems, useful statistical concepts and programming with Matlab.
Professor: Dominique Bonvin
Type of project: Semester or Master
Contact: Julien Billeter, Sriniketh Srinivasan
B049——————————————————————————–
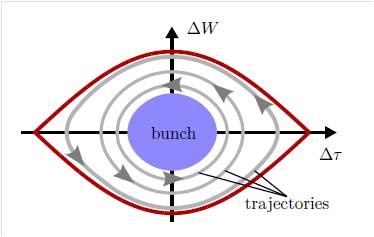
Control of particle beams in synchrotrons
Particle accelerators are of great interest in theoretical and experimental physics. Beyond this, they are also used as heavy ion sources for medical applications. The operation of particle accelerators imposes interesting control challenges, since these systems are governed by very fast nonlinear dynamics, subject to exogenous disturbances, and limited by constraints on states and inputs. The state of the art of particle beam control is, however, mainly based on open-loop control concepts and simple feedback filters or algorithms that can be implemented on fast digital hardware.
This project deals with the control of the shape of a particle beam in a synchrotron. The projects objective is the design of an optimization-based control scheme that allows for consideration of input constraints and partial state-feedback. Based on an existing model the controller should be implemented in a Matlab environment. An important aspect of the project is benchmarking the predictive controller against a previously developed one.
The project involves the design and Matlab implementation of a predictive controller. A solid knowledge of Matlab and predictive control concepts as well as good programming skills are recommended.
Depending on the success of the project it can be combined with a subsequent master thesis in collaboration with Prof. Chris Kellett from the University of Newcastle, Australia and Dieter Lens from the Technical University of Darmstadt, Germany.
Professor: Dominique Bonvin
Type of project: Master or Semester
Contact: Timm Faulwasser
J010————————————————————————–
 Control of a roboticized rolling sphere
Control of a roboticized rolling sphere
The Sphero ball is a roboticized ball produced by the company Orbotix. The commercial product can be controlled through an iOs or Android device. It moves through the action of two internal motors that allow it to roll on the ground or even in water. It is also equipped with several inertial sensors and a set of colour LEDs.
The company proposes an iOS and Android API for developing specific applications for the spheros which easily allow to play with the actuators and the sensors onboard (see video).
The spheros represent a promising and challenging platform for control purposes. The project aims at proposing a control architecture for the sphero and to implement it. Simple setpoint control or trajectory tracking developed on the iOS device could serve as a first step. Subsequently, a conceptual model of the physics of the device, which is the main purpose of the project, will be inferred. Possible extensions include an interface with a Desktop environment like Matlab or Labview, as well as distributed control of more than one spheros so as to collaboratively execute a specified task.
Proficiency in one (or all) of the following is required : C / Objective-C / Android / iOS apps development
Professor: Colin Jones
Type of project: Master
Contact: Tomasz Gorecki and Georgios Stathopoulos
L048—————————————————————————–
 Control of a hydrofoil boat
Control of a hydrofoil boat
The Energy company HYDROS has launched an engineering contest for students. The goal of the project is to construct an energy efficient hydrofoil boat, by improving a starter-kit. The project is a multi-disciplinary, multi-lab project. The Automatic Control lab will be responsible for control and sensing.
The hydrofoil boat will use an embedded controller to maintain pitch and roll stability. The student must design a control strategy, and choose the necessary sensors and processor. The student must carry out a review of existing hydrofoil stabilization strategies. Design factors that affect the control problem will be identified. Control strategies for the most likely scenarios will be designed based on simplified dynamic models. The required measured quantities will be identified, and the most suitable sensors to measure them obtained. More rigorous simulation-based testing and tuning of the control strategies will be carried out in the following semester. In the first semester the focus will be on defining a general control strategy, and obtaining and testing the hardware necessary to implement it.
This is a project for one student with a good knowledge of Control Theory.
Professor : Roland Longchamp
Type of project: Semester / Master
Contact: Philippe Mullhaupt
B053—————————————————————————–
 Temperature and pressure control for professional coffee machines
Temperature and pressure control for professional coffee machines
To have the best possible coffee in your cup, not only do the coffee beans need to have the right taste and quality, but the process to extract the different flavors must also be under tight control. Water temperature and pressure are two important parameters that need to be controlled in a coffee machine to get the right taste. These two parameters can also have a big impact on energy consumption depending on the technology used to control them.
The goal of this project is to develop an environmentally friendly and efficient control system for the next generation of coffee machines. Using a recently developed characterization of the system components, a strategy for accurate control of both temperature and pressure will be elaborated. The student will first adapt and validate the process model that was developed as part of a previous project. He will then develop an appropriate control strategy using Matlab and implement it on a prototype coffee maker using LabView. The performance of the new system will be benchmarked with respect to existing technologies.
Most of the work will be done at the Laboratoire d’automatique of EPFL, with occasional visits to the research center of Parker Hannifin in Geneva for the experimental implementation.
Professor: Dominique Bonvin
Type of project: Master
Contact: Julien Billeter
J019——————————————————————————–

Fly Phone
The most advanced, autopilots for small RC aircraft are no comparison for the might of a smartphone. Specifications read (for a PX4) 168Mhz ARM microcontroller and a ton of 192KB of RAM compared to a (Google NEXUS) S4 Snapdragon, running at 1.7Ghz and hosting 2GB of RAM. Integrated components such as Wi-Fi, Bluetooth, GSM, accelerometers, GPS, gyroscopes, barometers, ambient light sensors and a compass into the same device allow for fast deployment.
The fly phone project intents to explore the superior computational and sensor capabilities of modern smartphones in an attempt to be used as autopilots for small autonomous vehicles.
The goal of the project is to construct a hardware/software platform that can be used for the development of advanced control methods.
Professor: Colin Jones
Type of project: Master
Contact: Ioannis Lymperopoulos
B055——————————————————————————–
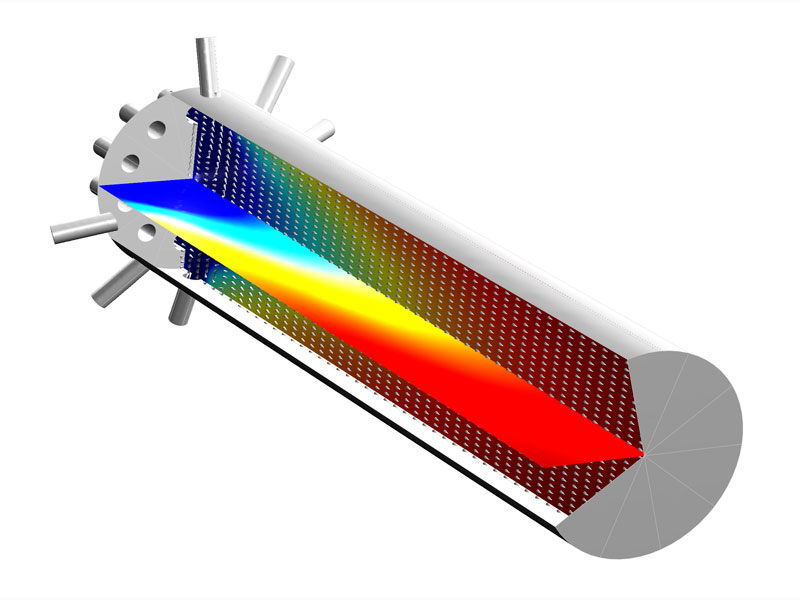 Incremental model identification in plug flow reactors
Incremental model identification in plug flow reactors
The chemical reactor is generally the first operation unit in chemical and pharmaceutical manufacturing. It is also considered as the most important one as it defines the requirements for the following units involved in the separation and purification of the reaction products. A reliable model for the chemical reaction system contributes to the improvement of the performance of the process, providing better monitoring, control and optimization. The incremental method of identification decomposes the task of model identification into a set of sub-problems that can be solved individually. One transforms first the measured concentrations in rates or extents, which can be subsequently modeled independently. Such transformation reduces the dimensionality of the dynamic model by removing redundant states (invariants). More importantly, the transformation decomposes the dynamics of the reaction system into decoupled states (variants) which individually represent the rates of reaction, of transport phenomena, as well as the operating conditions, such as the inlet and outlet flows. The consequence of working with decoupled states is that the correlation between the estimated model parameters is reduced or even non-existing.
The Laboratoire d’Automatique has sound knowledge and long years of experience in the application of the extent-based incremental identification to continuous stirred-tank reactors (CSTR) in transient mode. Such reactors have been studied using reaction systems in homogenous and heterogeneous (gas-liquid) conditions.
The aim of this project is to extend the incremental identification method to spatially distributed reactors, such as plug flow reactors (PFR), in transient mode. These conditions lead to concentrations resolved in time and space. For such reactors, the main challenge lies in separating the effect of reactions from convective and diffusive flows. The student will analyze in details the operations of a plug flow reactor and develop a methodology in order to decouple the various phenomena that take place in this type of reactor. During this project, the student will learn mathematical concepts to solve complex chemical engineering problems and apply them in simulation using Matlab and Comsol.
Professor: Dominique Bonvin
Type of project: Semester or Master
Contact: Julien Billeter, Sriniketh Srinivasan
B056——————————————————————————–
 Identification of chemical reaction systems
Identification of chemical reaction systems
Measurements taken over time during the course of a reaction are an important source of information regarding the underlying chemical reaction system. These measurements contain information on the influence of various effects such as the reactions, mass transport phenomena, inlets and outlets. The key challenge is to interpret the information provided by these measurements and to develop a reliable model that can be used to improve the performance of the process, while ensuring its control.
Kinetic models of reaction systems can be identified by two types of approach. In the simultaneous approach, the model identification is performed in a single step by postulating rate expressions for all reactions and mass transfers, and their corresponding parameters are estimated by comparing measured and modeled concentrations. The advantage of this approach is that complex rate models can be identified with almost no restrictions on the minimum number of measured species. Its disadvantage is that it usually leads to strong correlation between parameters and suffers from structural identifiability issues. The alternative is the incremental approach which decomposes the identification task into a set of subproblems that can be solved individually. One transforms first the measured concentrations in rates or extents, which can be subsequently modeled independently. The advantage of this approach is that model parameters can be estimated with very little correlation and at a very low computational cost. Its drawback is that severe restrictions are imposed on the number of measured species allowing to decouple the influence of the different effects.
The aim of this project is to develop a novel model identification method that combines the advantages of both simultaneous and incremental approaches. In this project, the student will learn the state of the art in simulation of reaction systems, model identification and parameter estimation using a Matlab programming environment.
Professor: Dominique Bonvin
Type of project: Semester or Master
Contact: Julien Billeter, Sriniketh Srinivasan
J015——————————————————————————–
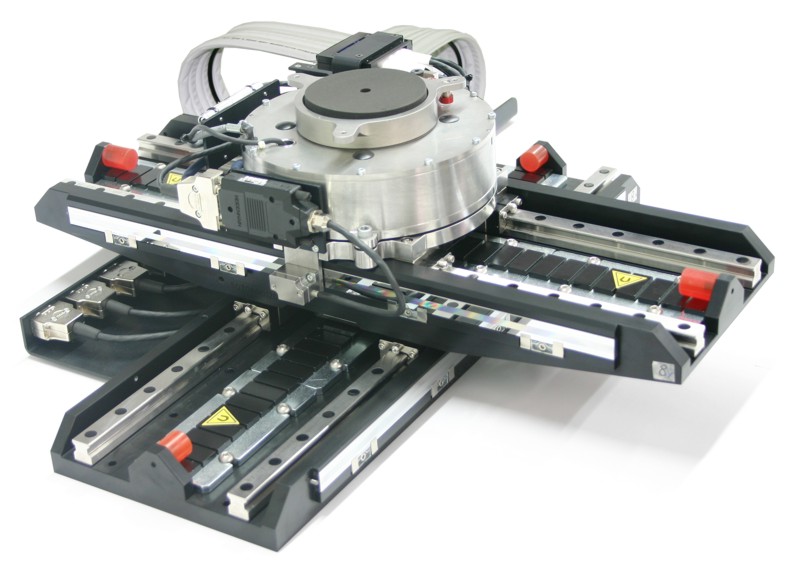 Nano positioning control
Nano positioning control
This project will design a controller for an X-Y industrial nano-positioning system used for a rapid inspection of silicon wafers. The system is designed and manufactured by the world-leading Swiss company ETEL Motion Technology.
The projects consists of two parts:
- Design of a robust linear controller
- Trajectory planning
Both tasks are challenging, research-grade, problems and as such can be assigned as a stand-alone project. The student is expected to conduct most of the experiments in simulation using Matlab and Simulink on a detailed model provided by ETEL. After that, experiments on real hardware, either at our lab or directly at ETEL, will take place. Close cooperation with ETEL staff and strong knowledge of control theory and design tools (Matlab control system toolbox, Simulink) are expected.
The project can be taken either as a master project or an industry internship at ETEL.
Professor: Colin Jones
Type of project: Master or Master in industry
Contact: Milan Korda
K024———————————————————————-

Adaptive correction of geometry evolution of a grinding machine
Machine tools need more and more to be precise and to have a reliable production. Based on the design, engineers try to make them as much as possible autonomous and independent from external disturbances.
The goal of this project is to develop a new approach to improve the accuracy of a grinding machine with 6 numerical axes designed for complex tools made of hard materials.This machine has its own measuring system made up of 3 linear absolute encoders. The geometry of this machine is defined by references which can be measured in order to study their evolution. Therefore, they describe the geometrical changes of the machine depending on the internal and external disturbances, mainly due to the temperature variation.
In a past project a Kaman filter has been designed that estimates the geometrical evolutions using the cooling oil temperature and past irregular position measurements. The objective of this project is to apply this Kalman filter on a grinding machin, adjust its parameter and compare its performance with the existing methods.
This project is carried out in collaboration with Rollomatic SA in Switzerland.
MER: Alireza Karimi
Type of project: Master in industry
Contact: Zlatko Emedji
J013——————————————————————————-
 Control of synchronous machines using load-commutated inverters
Control of synchronous machines using load-commutated inverters
The Control & Optimization group at ABB Corporate Research is active in the areas of system modeling and control for applications in industrial processes, energy conversion, and power generation technologies. We are looking for outstanding students to join our team in an exciting internship for 6 to 12 months or to write your Master Thesis with ABB. You will deepen your understanding of the use of advanced control and optimization methods in industry within an international and highly motivated team.
Your tasks:
- work in close cooperation with the group right from the start;
- familiarize with existing torque and speed control systems of synchronous machines with load-commutated inverters;
- develop and test a suitable estimation and control system using state-of-the-art methods;
- ensure an efficient and high-quality implementation on industrial platforms;
- document, report, and present your results.
The requirements:
- student (m/f) in control engineering, mechatronics or a related discipline, with outstanding academic credentials;
- strong team orientation;
- motivated to work on a relevant and challenging control problem.
Professor: Colin Jones
Type of project: Master in industry
Contact: Jean-Hubert Hours
B057———————————————————————————-

Modeling and optimization for a PEM fuel cell stack for automotive applications
Fuel cells are electrochemical devices that produce electrical power from hydrogen and oxygen, while producing water. For automotive applications, proton exchange membrane (PEM) fuel cells show the best potential. However, these devices need to operate close to maximal efficiency to be viable, while respecting several stringent operating constraints to avoid reducing the lifetime of the cells and the autonomy of the vehicle. In automotive applications, the operation of PEM fuel cells is ruled by the need of producing the amount of power required by the driver. Whenever this power load changes, the optimal operating conditions of the fuel-cell stack change as well, thus calling for real-time adaptation of the operating conditions.
The aim of this project, which will be performed in collaboration with Belenos Clean Power Holding, a spin-off of the Swatch Group, is to optimize the operating conditions. The first step would be to carry out system modeling and numerical optimization. In the second step, available plant measurements should be taken into account and a real-time optimization strategy should be implemented for the simulation model. Depending on the project progress, it is foreseen to validate the real-time optimization algorithm on a real fuel-cell stack.
The student is required to have working knowledge of Matlab and interest in numerical optimization.
Professor: Dominique Bonvin
Type of project: Semester or Master
Contact: Singhal Martand and Timm Faulwasser
J028——————————————————————————–
 Sensor fusion on Android
Sensor fusion on Android
The Fast Toy Lab is developing control algorithms to drive hovercrafts autonomously using Android phones.
As a first step, an Android application has been developed to integrate models of the vehicle and controllers. In order to make our vehicles fully autonomous, we need an accurate position estimation. For this, a standard procedure consists in correcting the GPS data using the Inertial Sensors, which are on the phone, using a Kalman filter. This project will be focused on benchmarking existing GPS/INS sensor fusion techniques, implementing a sensor fusion algorithm on Android and using it in the control loop of an hovercraft.
Requirements: Matlab, Java programming, Kalman filtering
Professor: Colin Jones
Type of project: Master
Contact: Jean-Hubert Hours