Biomechanical model of the shoulder: a highly overactuated manipulator
Yvan Michellod, Philippe Müllhaupt, Denis Gillet, Alexandre Terrier, Dominique Pioletti, Roland Longchamp, Martin Aeberhard
Overview
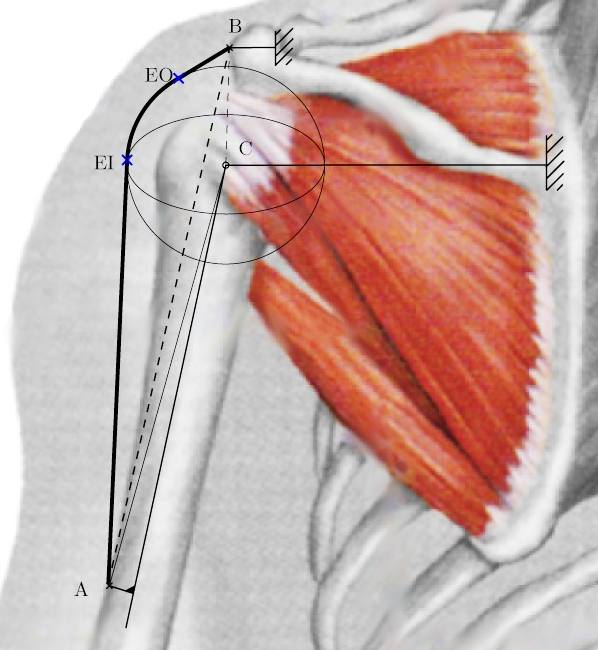
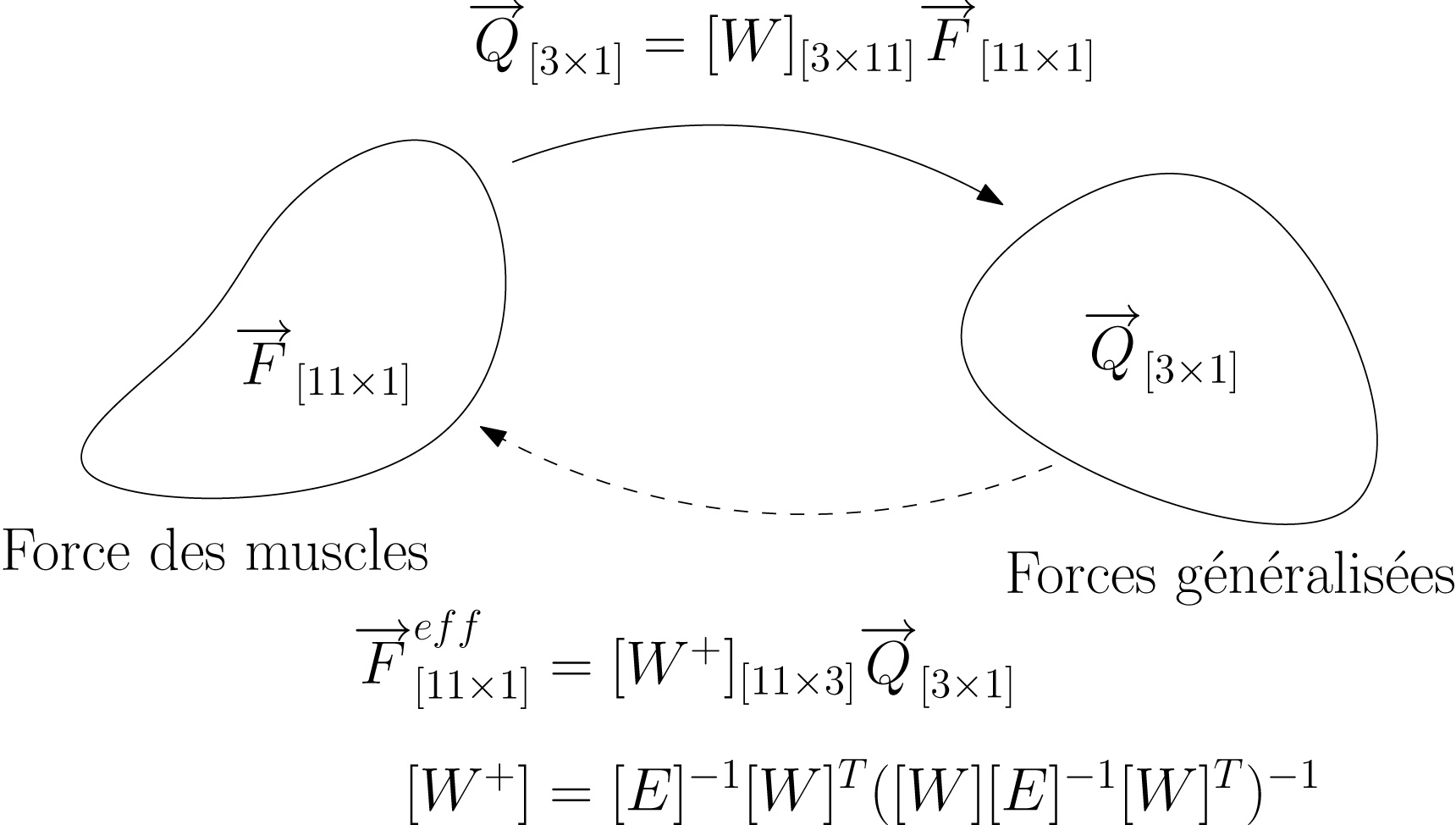
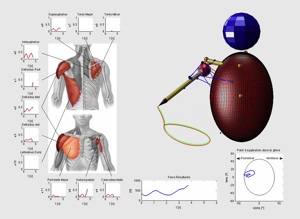
The shoulder is a very complex system of four articulations, actuated by more than twenty muscles. Hence the system is highly overactuated and the force-distribution on the different muscles must be determined by optimization. The muscle-forces have a direct impact on the resulting force inside the articulations. Arthrisis seems to be a consequence of an eccentric load on the glenohumeral joint. Also the design of shoulder implants is highly influenced by the prevailing reaction-forces.
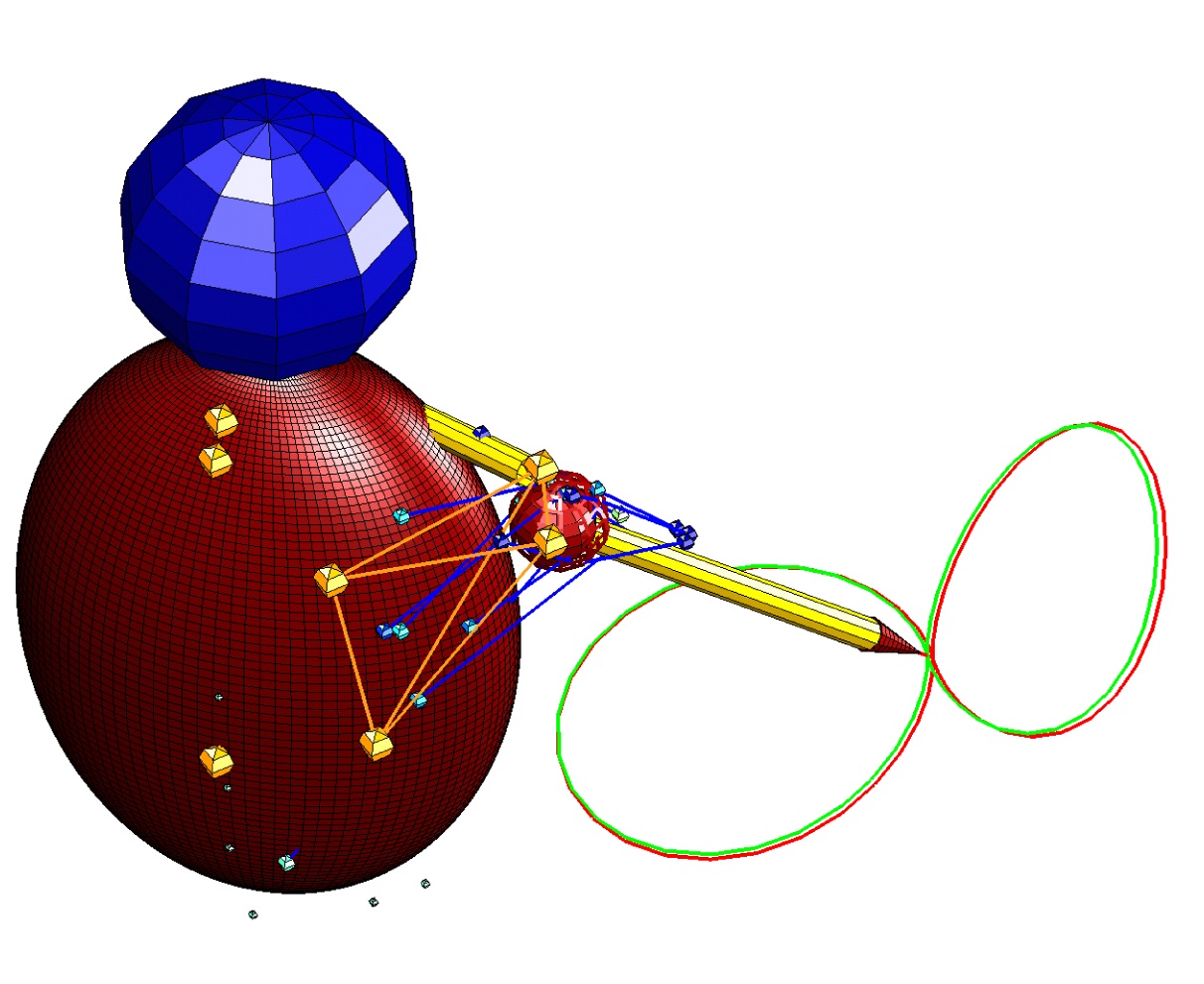
In collaboration with the Joint Biomechanics group of the laboratory of Biomechanical Orthopedics LBO , a dynamic model of the shoulder is currently developed including the glenohumeral joint and eleven muscles.
Keywords : Biomechanics; Overactuation; Muscle Wrapping; Null Space; Pseudoinverse; Shoulder; Dynamic Model; Glenohumeral Joint;
|
Abduction
|
Eight
|
Related publications
[epfl_infoscience url=”https://infoscience.epfl.ch/publication-exports/2864/”]