Mark Butcher, Marc Kunze, Alireza Karimi, Roland Longchamp
Overview
The aim of the project was to design a robust RST controller for an X-Y table, composed of 2 linear permanent magnet synchronous motors, capable of achieving high precision positioning.
The advantages of this kind of system are high acceleration and deceleration capabilities, no backlash and reduced friction. However, due to the absence of a mechanical transmission, the external disturbances and unknown dynamics have a large influence on the precision of positioning. A controller that effectively rejects perturbations and provides robust performance is, therefore, required. A two-degree-of-freedom, RST controller structure is thus necessary.
To achieve the performance objectives the following steps were followed:
– Identification: 81 non parametric, frequency domain models corresponding to different positions were obtained using spectral analysis. The results showed a clear dependence of the system’s dynamics on its position.
– Design of the polynomials R and S (feedback) in order to be robust to the variations of the dynamics, the unmodeled dynamics, the non linearities and the uncertainties. The linear programming method, developed in a research project, was used.
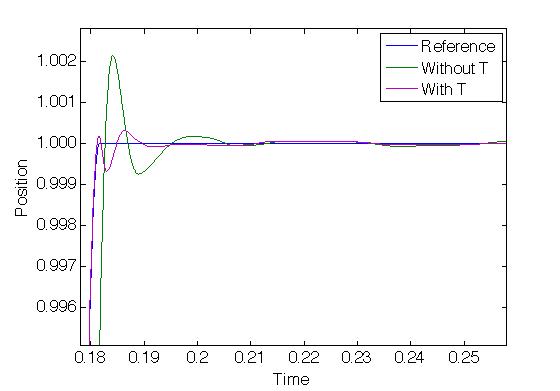
– Design of the polynomial T (feedforward) in order to improve the tracking. The data driven precompensator tuning method using the correlation method, developed in a research project, was employed to tune the parameters of the T polynomial.
This project was done in collaboration with ETEL, an industrial partner.
Keywords : Linear motor; RST controller; feedback; feedforward;
X-Y table.
![]()
![]()
![]()
Related publications
[epfl_infoscience url=”https://infoscience.epfl.ch/publication-exports/2863/”]