Optical Differential Delay Line: large scale nanometer positioning
Yvan Michellod, Philippe Müllhaupt, Denis Gillet
Overview
The strive for extrasolar planetary research has become increasingly popular over the last years. A new astrometric measurement method, the microsecond-astrometry, promises further discoveries of characteristics of other planetary systems. Furthermore, the atmosphere blurs the observations taken from earth and more precise and accurate instruments are being developed to compensate these disturbances to earthbound observation.
The Differential Delay Line (DDL) developed by a European consortium including the Ecole Polytechnique Fédérale de Lausanne (EPFL) and the Observatory of Geneva is one subsystem of an instrument to enable microsecond-astrometry in the Very Large Telescope Interferometer (VLTI). In addition, it is able to reduce the effect of atmospheric disturbance in other instruments and therefore improve the performance of earthbound observation with the VLTI. The VLTI is part of the Very Large Telescope, which is operated by the ESO and situated on Cerro Paranal in Chile.
Keywords : Nonlinear Control; Nano-Positionning; Overactuation; Dual-Stage; Piezoelectric Actuator; PM Stepper Motor;
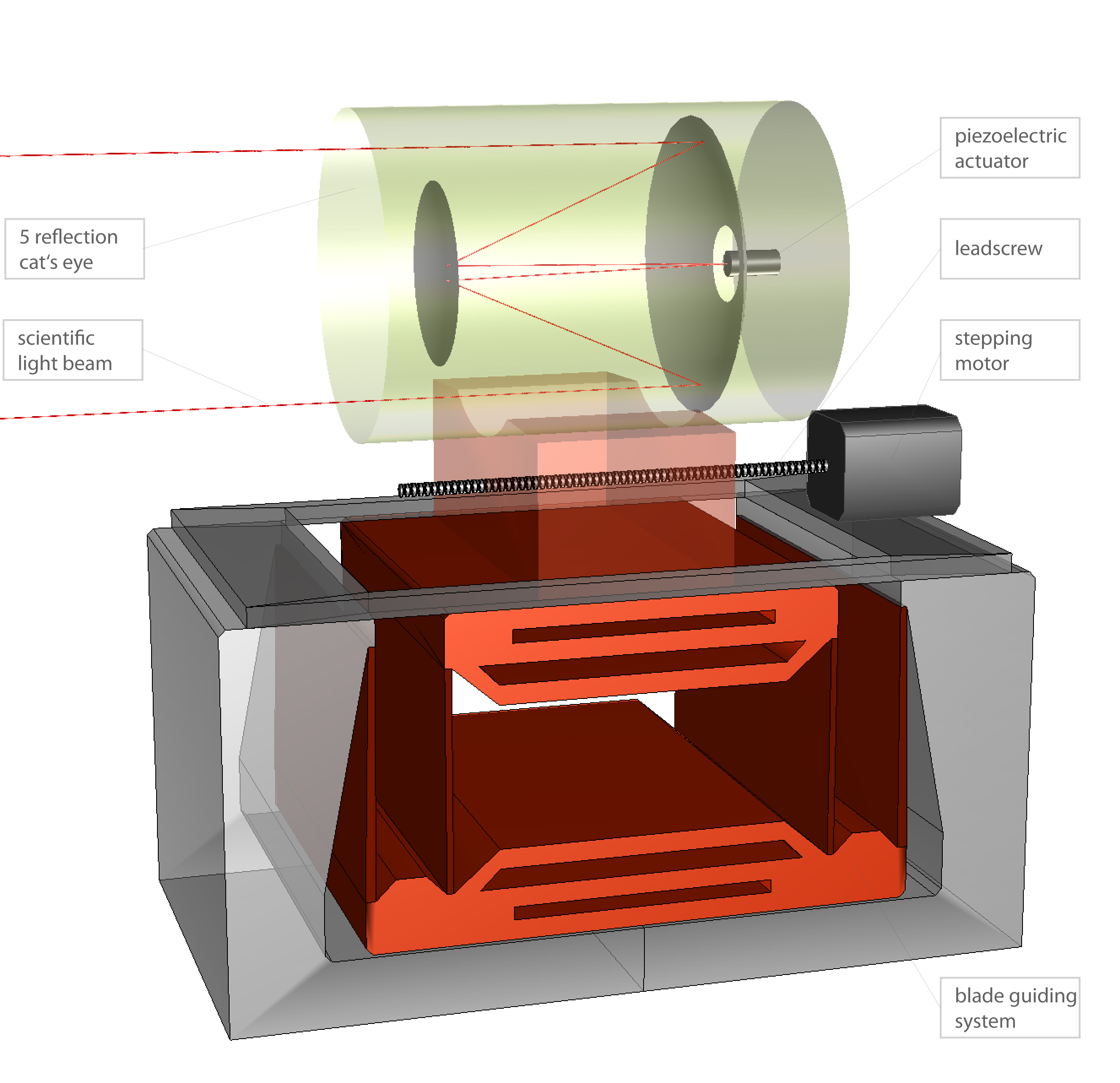
Dual-stage DDL
click for the DDL animation

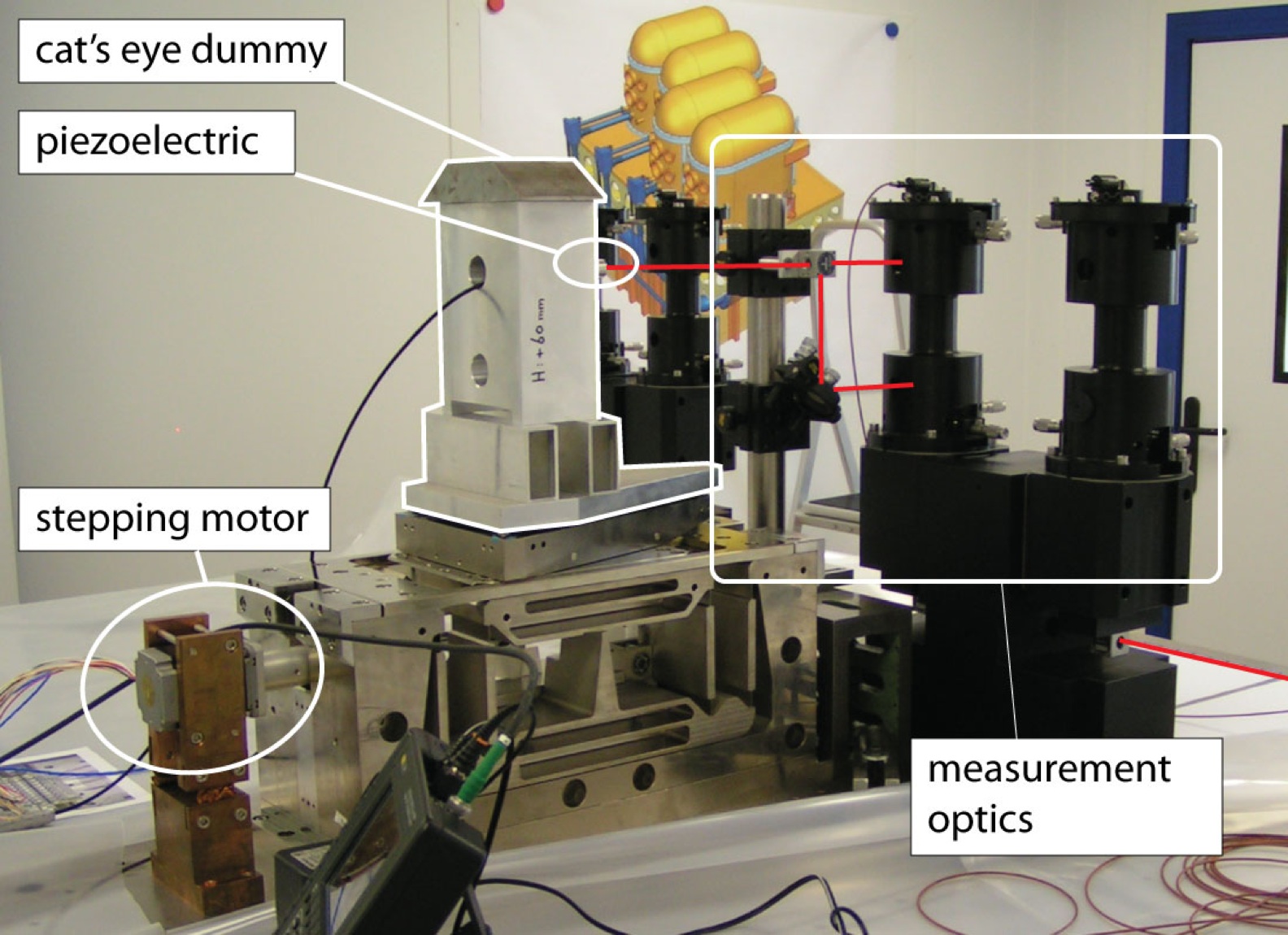
A prototype has been developed and is the base for research considering the accurate tracking with the DDL. As the DDL is overactuated, that is two actuators are used to obtain one output position, specific considerations are explored to guarantee the correct use of each stages advantages.
Various control approaches have been implemented to combine these two actuators and to analyze the behavior of the overactuation on the tracking performance. These approaches include decoupled SISO design techniques as well as multivariable regulator developments.
[epfl_infoscience url=”https://infoscience.epfl.ch/publication-exports/2857/”]