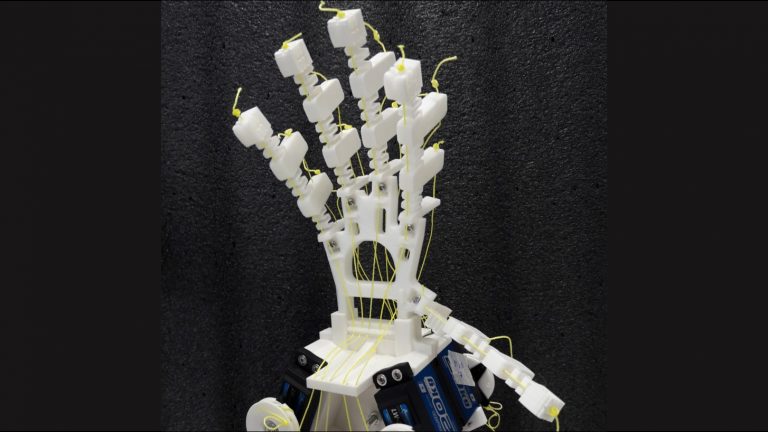
Developing methods of co-optimizing the physical structure (body) and brain (controller) for a fixed robot, or for a robot that evolves or develops over time.
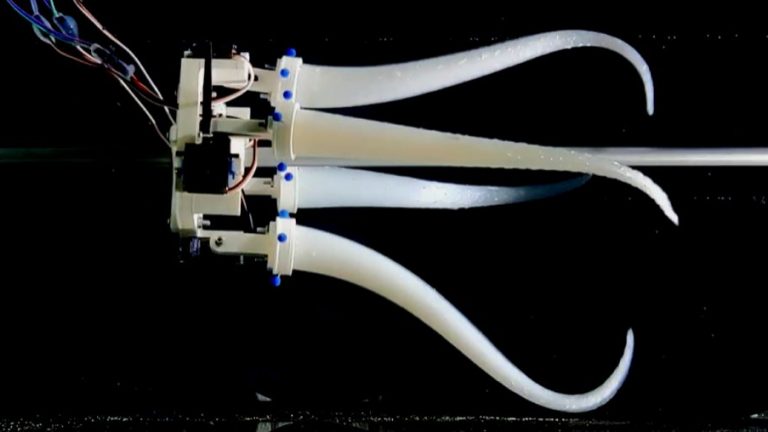
Developing data-driven or computational techniques to understand and optimize the design of complex deformable robots.

Applying data-driven or computational techniques to develop robots that have complex interactions with the environment.